目录标题
1.Moveit的源码安装
因为binary安装的Moveit无法自定义算法,所以要把之前安装的先卸载。如果没有安装可以跳过1.1步。
1.1卸载二进制安装的Moveit
$ sudo apt-get remove ros-melodic-moveit-*
1.2源码安装Moveit
更新软件包
$ rosdep update
$ sudo apt-get update
$ sudo apt-get dist-upgrade
安装依赖
$ sudo apt-get install python-wstool python-catkin-tools clang-format-3.9
创建Moveit工作空间
$ mkdir ~/ws_moveit
$ cd ~/ws_moveit
加载环境变量
$ source /opt/ros/melodic/setup.bash
下载moveit源码并编译
$ wstool init src
$ wstool merge -t src https://raw.githubusercontent.com/ros-planning/moveit/master/moveit.rosinstall
$ wstool update -t src
$ rosdep install -y --from-paths src --ignore-src --rosdistro ${ROS_DISTRO}
$ catkin config --extend /opt/ros/${ROS_DISTRO} --cmake-args -DCMAKE_BUILD_TYPE=Release
$ sudo catkin build

没有报错就成功,如果有包丢失,或者安装失败需要重复语句,直到安装成功。
这里参考了road_of_god博客的第一章,(链接: link)。
2.OMPL源码安装
和第一部分一样,如果之前二进制安装了Moveit,会自动给你安装OMPL的,刚刚卸载了Moveit,但是OMPL还在里面,所以还要先卸载,如果没有安装过,可以跳过2.1
2.1卸载OMPL
参考洱棟七的知乎回答link
首先进入根目录的库文件,检查是否有OMPL库。
$ cd /opt/ros/melodic
$ find ./ -name "ompl*"
$ find ./ -name "libompl"
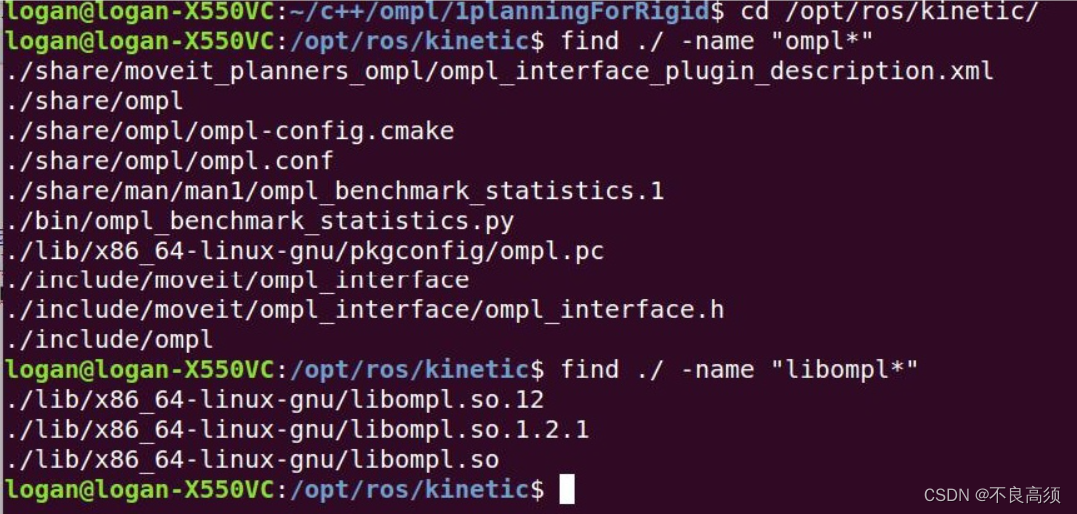
看看自己下面有没有这些包和库文件,如果没有直接跳到下一步,如果有应该卸载。
$ sudo apt-get purge ros-melodic-ompl
然后再运行前面的两条find命令,应该找不到ompl相关的文件了。
至此,卸载成功。
2.2源码安装OMPL
这里参考link的第三章。
首先下载ompl的源码
$ cd ~/ws_moveit/src
$ git clone https://github.com/ompl/ompl
如果clone不好用,可以直接进入连接,下载压缩包,再解压到ws_moveit/src。
刚刚我们在一个./lib目录下卸载了三个.so文件,所以要把新下载的文件再安装上去。
先进入/ompl/src/ompl看是否有一个CMakeList.txt文件,如果有跳过这一段话,如果没有要先下载:
$ cd ~/ws_moveit/src/ompl/src/ompl
$ wget https://raw.githubusercontent.com/ros-gbp/ompl-release/debian/melodic/xenial/ompl/package.xml
然后进行安装之前,所以要修改安装目录,打开~/ws_moveit/src/ompl/src/ompl/CMakeList.txt中约第80行的安装地址:
DESTINATION ${CMAKE_INSTALL_LIBDIR}
改为:
DESTINATION "/opt/ros/melodic/lib"
然后可以编译安装ompl
$ cd ~/ws_moveit
$ sudo catkin build
正常安装且没有报错后,进行2.1步的find命令会找到新安装的ompl库。
至此。ompl的源码成功。可以进入第三章的自定义规划算法,
下面是我遇到的问题,可以跳过
在自定义ompl的源码后,每次修改并且build之后,运行ros更换成自己的规划算法MyRRT会报错,程序直接卡死。报错显示无法识别MyRRT。
其实每次编译之后,ompl会在/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/下再创建三四个.so的库文件,而moveit真正运行ompl库其实就是这几个库文件,而不是/opt/ros/melodic/lib下的库文件,这个下面的库文件是和编译有关的,所以要把CmakeList.txt中修改的路径再修改回来。再改回来
DESTINATION ${CMAKE_INSTALL_LIBDIR}
修改planners下的规划程序,再次build后,运行你的程序就是你修改的了。
测试验证:进入~/ws_moveit/src/ompl/src/ompl/geometric/planners/rrt/src
找到MyRRT.c修改大概227行位置
OMPL_INFORM("%s: MyRRT Created %u states", getName().c_str(), nn_->size());
在更换为MyRRT作为路径规划的程序后,在终端打印的字符就变成了,MyRRT Created,证明修改成功。
3.自定义规划算法
3.1自定义RRT
参考连接link
这个连接其中还有很多ompl的总结,可参考。
以ompl自带的RRT算法为例子:
第一步 进入~/ws_moveit/src/ompl/src/ompl/geometric/planners/rrt/src,把RRT.c和RRT.h复制重命名为MyRRT.c和MyRRT.h,进入这两个复制的文件,把里面所有的RRT字符替换为MyRRT。
第二步 进入~moveit_ws/src/moveit/moveit_planners/ompl/ompl_interface/src中找到planning_context_manager.cpp,添加头文件
#include </home/ununtu/ws_moveit/src/ompl/src/ompl//geometric/planners/rrt/MyRRT.h>
不要直接复制,看看你自己的h文件目录在哪。
还是在planning_context_manager.cpp下找到这个函数
void ompl_interface::PlanningContextManager::registerDefaultPlanners()
在里面仿照其他的语句,添加
registerPlannerAllocator( //
"geometric::MyRRT", //
std::bind(&allocatePlanner<og::MyRRT>, std::placeholders::_1, std::placeholders::_2, std::placeholders::_3));
其实就是把RRT那条复制来,再把RRT改为MyRRT就可以保存了。
第三步 打开你要运行的程序的ompl_planning.yaml,moveit默认的路径在/home/arl/ws_moveit/src/panda_moveit_config/config/ompl_planning.yaml,但是你的包可能用的不是这个ompl_planning.yaml,找到你的这个yaml文件后,仿照着RRT添加说明:
MyRRT:
type: geometric::MyRRT
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability? default: 0.05
参考RRT,文件下面还要添加
- MyRRT
至此规划算法的修改完成。
如果有报错,参考连接 link
Errors << moveit_planners_ompl:make /home/arl/ws_moveit/logs/moveit_planners_ompl/build.make.020.log
/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/libmoveit_ompl_interface.so.1.0.8:对‘ompl::geometric::TORRT::~TORRT()’未定义的引用
/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/libmoveit_ompl_interface.so.1.0.8:对‘ompl::geometric::TORRT::TORRT(std::shared_ptr<ompl::base::SpaceInformation> const&)’未定义的引用
collect2: error: ld returned 1 exit status
make[2]: *** [/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/moveit_planners_ompl/moveit_ompl_planner] Error 1
make[1]: *** [ompl_interface/CMakeFiles/moveit_ompl_planner.dir/all] Error 2
make[1]: *** 正在等待未完成的任务....
/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/libmoveit_ompl_interface.so.1.0.8:对‘ompl::geometric::TORRT::~TORRT()’未定义的引用
/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/libmoveit_ompl_interface.so.1.0.8:对‘ompl::geometric::TORRT::TORRT(std::shared_ptr<ompl::base::SpaceInformation> const&)’未定义的引用
collect2: error: ld returned 1 exit status
make[2]: *** [/home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/moveit_planners_ompl/generate_state_database] Error 1
make[1]: *** [ompl_interface/CMakeFiles/moveit_generate_state_database.dir/all] Error 2
make: *** [all] Error 2
cd /home/arl/ws_moveit/build/moveit_planners_ompl; catkin build --get-env moveit_planners_ompl | catkin env -si /usr/bin/make --jobserver-fds=6,7 -j; cd -
显示的是库文件无法识别刚修改的MyRRT,解决办法:
$ cd /home/arl/ws_moveit/devel/.private/moveit_planners_ompl/lib/
$ sudo rm -rf libmoveit_ompl_interface.so.* //把lib下生成的库文件先删除
$ cd ~/ws_moveit/
$ sudo catkin build //重新编译
还不行的话,按照第二章的方法,卸载重装OMPL。
3.2编译测试
$ cd ~/ws_moveit/
$ sudo catkin build
如果没有报错说明修改成功了。
在运行你的launh文件,打开Rviz和MotionPlanning组件,设置好目标点后选择你的MyRRT算法,并开始planning,终端打印的规划的信息,Rviz显示规划的演示,说明修改成功。
测试验证:进入~/ws_moveit/src/ompl/src/ompl/geometric/planners/rrt/src
找到MyRRT.c修改大概227行位置
OMPL_INFORM("%s: MyRRT Created %u states", getName().c_str(), nn_->size());
在更换为MyRRT作为路径规划的程序后,在终端打印的字符就变成了,MyRRT Created,证明修改成功。
之后可以写你自己的规划算法并按照上面方法添加到moveit上面。