算法逻辑
在点集凸包算法python实现这篇博客中介绍了一种凸包算法,这种算法中凸包点搜索的过程较为麻烦,主要是因为计算点集连线与X轴的夹角需要考虑到四个不同象限,在这里通过计算向量夹角的方式,对凸包点集的搜索过程进行了优化
算法逻辑如下图所示:

python代码实现
from osgeo import ogr, gdalconst, osr
import numpy as np
def getAlfa(startPoint, endPoint):
dx = endPoint[0] - startPoint[0]
dy = endPoint[1] - startPoint[1]
if dx == 0:
if dy > 0:
return np.pi / 2
elif dy < 0:
return 3 * np.pi / 2
else:
return np.pi
alfa = np.arctan(dy / dx)
if dx < 0:
alfa += np.pi
elif dy < 0:
alfa += np.pi * 2
return alfa
def convexHull(xys: np.array):
convexPoints = []
ymin = np.min(xys, axis=0)[1]
index = np.where(xys[:, 1] == ymin)[0][0]
convexPoints.append(xys[index, :])
n = 1
while True:
startPoint=convexPoints[-1]
if n==1:
previousPoint=np.array([startPoint[0]+100,startPoint[1]])
else:
previousPoint=convexPoints[-2]
index=0
minCosAngle=0
v1=previousPoint-startPoint
for i in range(xys.shape[0]):
nextPoint=xys[i,:]
v2=nextPoint-startPoint
cosAngle=np.dot(v1,v2)/(np.sqrt(np.sum(v1**2))*np.sqrt(np.sum(v2**2)))
if i==0:
index=i
minCosAngle=cosAngle
else:
if cosAngle<minCosAngle:
minCosAngle=cosAngle
index=i
convexPoints.append(xys[index,:])
n+=1
xys=np.delete(xys,index,axis=0)
firstPoint=convexPoints[0]
endPoint=convexPoints[-1]
if firstPoint[0]==endPoint[0] and firstPoint[1]==endPoint[1]:
break
wktPolygon = ""
for i in range(n):
x = convexPoints[i][0]
y = convexPoints[i][1]
wktPolygon = '{} {},'.format(x, y) + wktPolygon
wktPolygon = wktPolygon[0:-1]
wktPolygon = "POLYGON(({}))".format(wktPolygon)
return wktPolygon
if __name__ == "__main__":
ogr.RegisterAll()
ds = ogr.Open("./point.shp", gdalconst.GA_ReadOnly)
oLay = ogr.DataSource.GetLayer(ds, 0)
ogr.Layer.ResetReading(oLay)
xys = []
while True:
oFea = ogr.Layer.GetNextFeature(oLay)
if oFea == None:
break
oPoi = ogr.Feature.GetGeometryRef(oFea)
x = ogr.Geometry.GetX(oPoi)
y = ogr.Geometry.GetY(oPoi)
xys.append([x, y])
xys = np.array(xys)
wktPolygon = convexHull(xys)
driver = ogr.GetDriverByName("ESRI Shapefile")
convexds = ogr.Driver.CreateDataSource(driver, "convexHull.shp")
srs = ogr.Layer.GetSpatialRef(oLay)
convexLay = ogr.DataSource.CreateLayer(
convexds, "convexhull", srs, ogr.wkbPolygon)
labelField = ogr.FieldDefn("label", ogr.OFTInteger)
ogr.Layer.CreateField(convexLay, labelField)
convexFea = ogr.Feature(ogr.Layer.GetLayerDefn(convexLay))
ogr.Feature.SetField(convexFea, "label", 1)
convexPolygon = ogr.CreateGeometryFromWkt(wktPolygon)
ogr.Feature.SetGeometry(convexFea, convexPolygon)
ogr.Layer.CreateFeature(convexLay, convexFea)
ogr.DataSource.Destroy(convexds)
ogr.DataSource.Destroy(ds)
print('ok!')
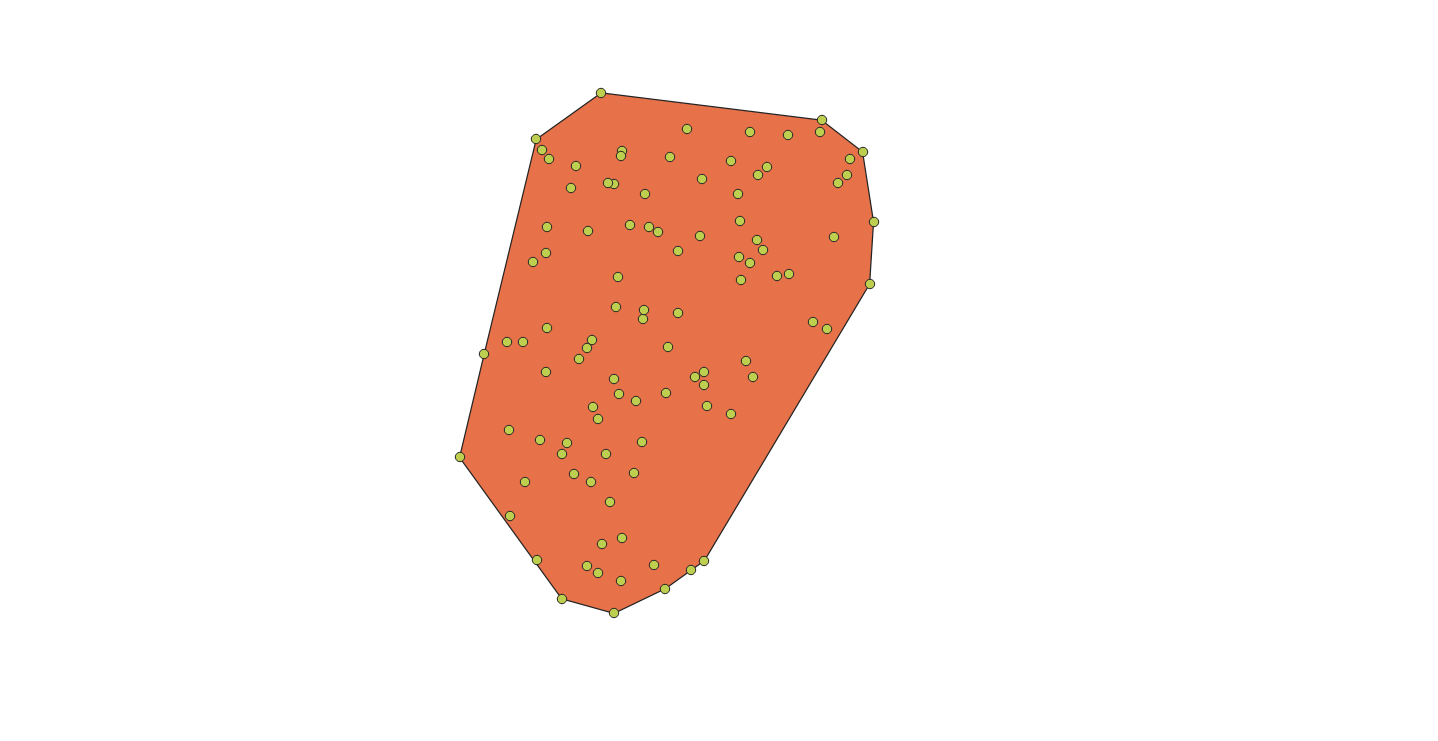
代码运行结果
版权声明:本文为TJLCY原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。