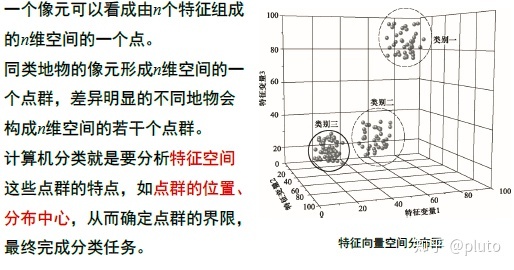
根据感兴趣目标在遥感图像上的特征差异,判断并识别其类别属性和空间分布特征等信息
遥感图像分类原理:不同地物具有不同特征描述,像元在n维特征空间中呈现分离状态
训练样本选取和评价
选取
- 每一类别的训练样本个数至少是特征空间维数的10~30倍
- 训练样本代表分类类别的特征差异必须纯净
- 小区域连续采集,全局均匀分布采集,分层采集,地理分层采集
评价
- 图表法:均值图法、直方图法、特征空间多维图法
- 统计法:转换离散度、Jeffries-Matusita距离法
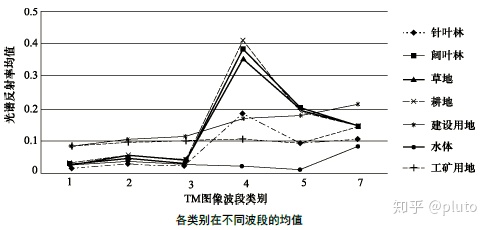
均值图法
构建折线图判断不同类别在不同特征空间的分布情况
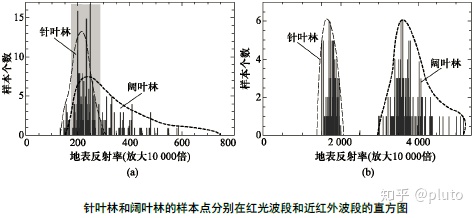
直方图法
显示训练样本在某一光谱波段上的灰度频数分布
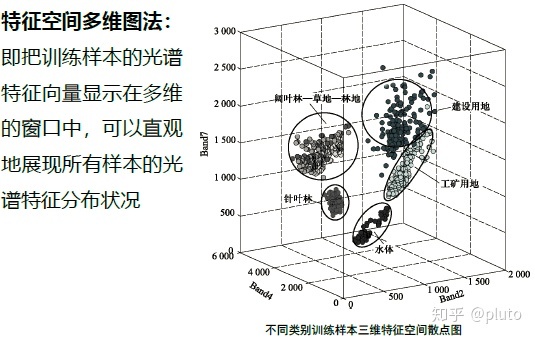
特征空间多维图法
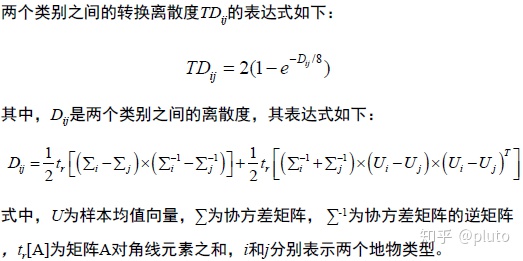
转换离散度法
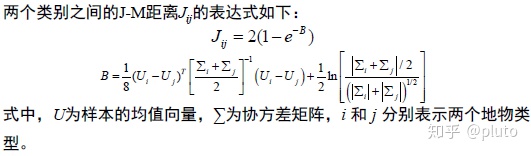
J-M距离法
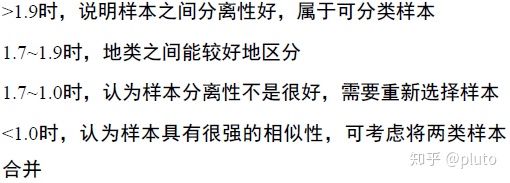
统计法判断依据:0~2.0
分类方法
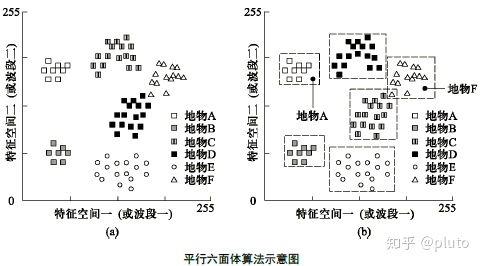
- 监督分类器:平行盒式算法
- 监督分类器:距离判断算法
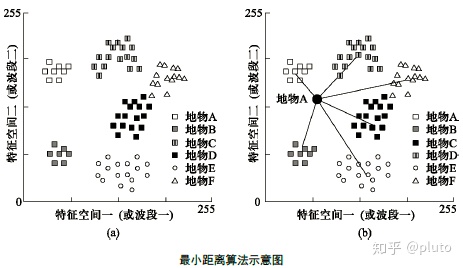
- 监督分类器:距离判断算法,欧氏距离和马氏距离(以协方差的倒数作为权重)
- 监督分类器:最大似然法,把待分类像元落入某类别条件概率最大的类定义为像元类别
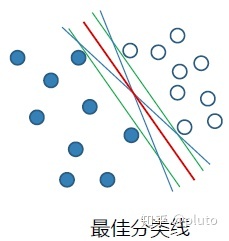
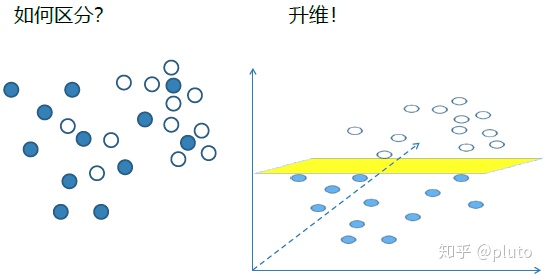
- 监督分类器:支持向量机分类算法,升到n维以找到n-1维的最大间隔超平面区分不同类别
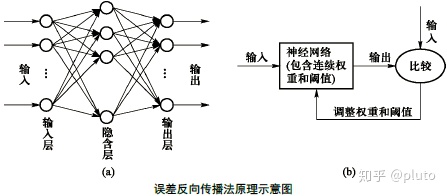
- 监督分类器:反向传播BP神经元网络模型
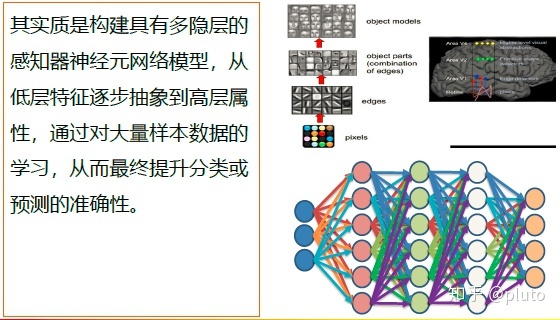
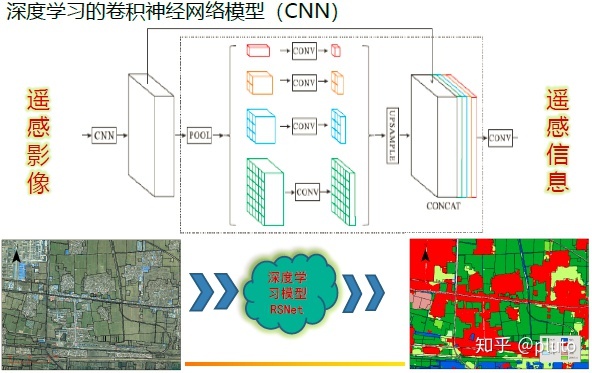
- 监督分类器:深度学习方法
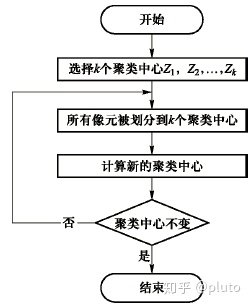
- 非监督分类器:K-均值算法
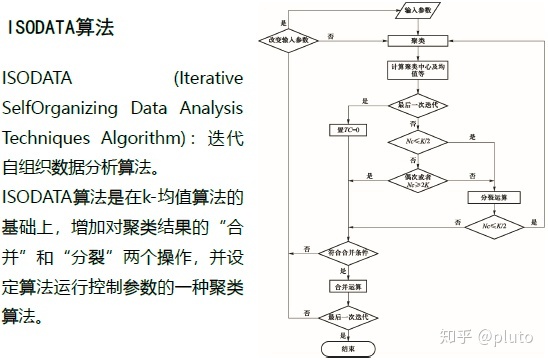
- 非监督分类器:ISODATA算法
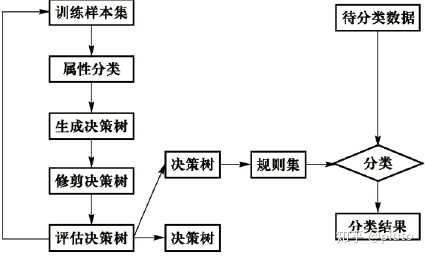
- 决策树分类
构建一套基于相关要素的判断规则,通过若干次中间判别,将多个相关要素变量数据集合逐步分解为几个属性均质的特征子集
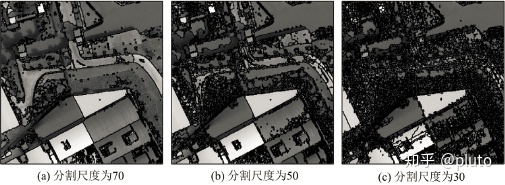
- 面向对象分类:先将图像分割成具有相同属性特征的均质单元,然后对均质单元分类
多尺度分割提取对象:将小的同质区域变成大的同质区域,逐级区域合并
分类后处理
对不符合实际情况和视觉习惯的小斑块进行剔除或合并到邻近的其它类别
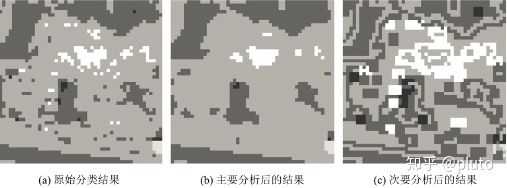
- 主/次要分析
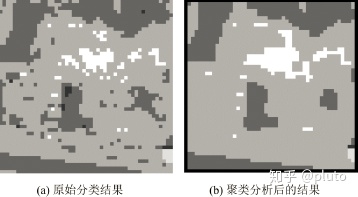
- 聚类分析
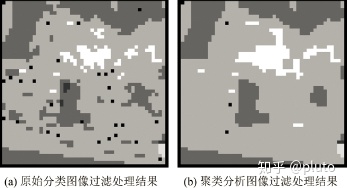
- 过滤处理
- 其它分类后处理
- 主要分析:将小图斑归并到周边像元数占多数的类别,次要分析:将像元数占多数的周边类别归并到小图斑中
- 聚类处理:用形态学膨胀和腐蚀操作将相邻的近似分类区域合并成同一类型
- 过滤处理:剔除小图斑,在聚类处理之后的图像上进行处理
- 分类合并,人工修正,矢量数据平滑处理
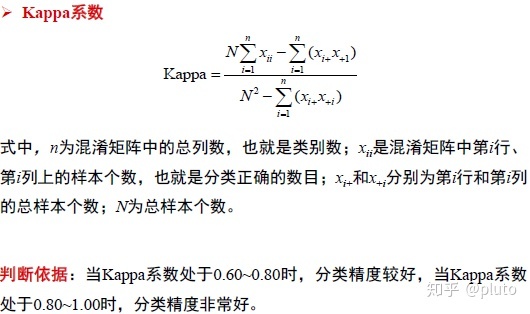
分类精度评价
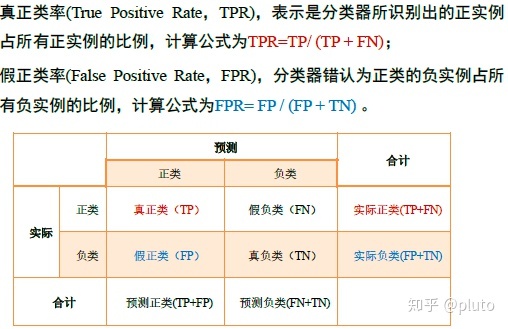
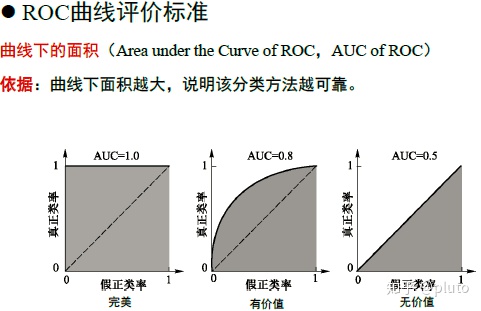
验证分类方法的优劣及分类结果的可靠性,以准确图像为参考,逐像元对比分类结果与参考图像之间的一致性,选取检验样本点,使用混淆矩阵、ROC曲线
ReceiverOperatingCharacteristicCurve,ROCCurve:利用图形来表示分类精度的方法

版权声明:本文为weixin_32521765原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。