之前很火的ZAO软件的换脸功能让大家觉得十分有趣,今天要介绍的这个案例也是通过Python实现简单的换脸功能,换脸过程可分为四步:
1.使用dlib提取面部标记。
该例子使用dlib的Python绑定来提取面部标记。dlib使用回归数集合直接从像素强度的稀疏子集估计面部的地标位置。该例子使用68个点来标记两张人脸的关键点,如下图所示:
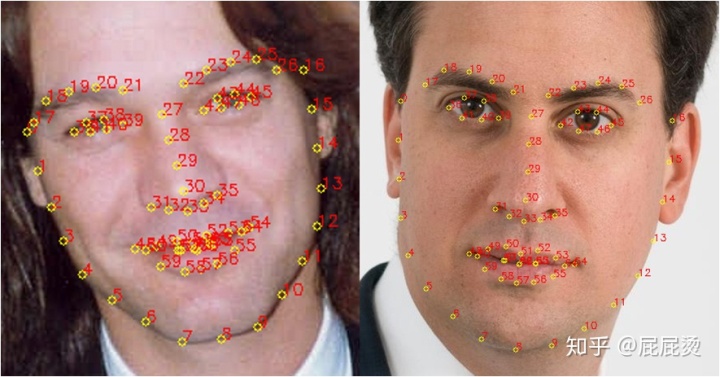
先将图像转化为numpy数组,并返回一个68*2的元素矩阵,输入图像的每个特征点对应每行的一个x,y坐标。
2.旋转、缩放和转换第二张图像,使之与第一张图像相适应。(普氏分析)
现在我们已经有了两个标记矩阵,每行有一组坐标对应一个特定的面部特征。我们现在要搞清楚如何旋转、翻译和规模化第一个向量,使它们尽可能适合第二个向量的点。想法是,可以用相同的变换在第一个图像上覆盖第二个图像。
代码分别实现了下面几步:
(1)将输入矩阵转换为浮点数。这是之后步骤的必要条件。
(2)每一个点集减去它的矩心。一旦为这两个新的点集找到了一个最佳的缩放和旋转方法,这两个矩心c1和c2就可以用来找到完整的解决方案。
(3)同样,每一个点集除以它的标准偏差。这消除了问题的组件缩放偏差。
(4)使用Singular Value Decomposition计算旋转部分。利用仿射变换矩阵返回完整的转化。
def 之后,结果可以插入OpenCV的cv2.warpAffine函数,将图像二映射到图像一。图像对齐结果如下图所示:
3.调整第二张图像的色彩平衡,使之与第一个相匹配。
如果我们试图直接覆盖面部特征,我们会发现一个问题,由于两张图片之间肤色不同,光线不同会造成覆盖区域边缘的不连续。如下图所示。
4.把第二张图像的特性混合在第一张图像中。
(1)用一个遮罩来选择图像2和图像1的哪些部分应该是最终显示的图像。如下图所示。
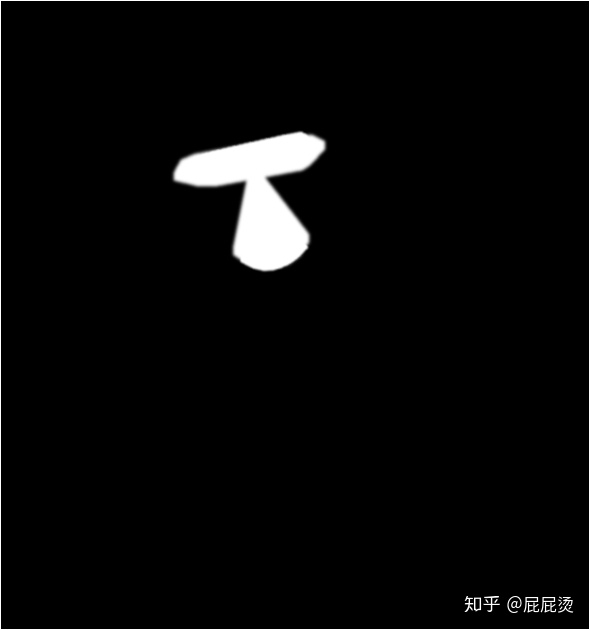
定义函数get_face_mask()为一张图像和一个标记矩阵生成一个遮罩,它画出了两个白色的凸多边形:一个是眼睛周围的区域,一个是鼻子和嘴部周围的区域。
值为1(白色)的地方为图像2应该显示出的区域,值为0(黑色)的地方为图像1应该显示出的区域。值在0和1之间为图像1和图像2的混合区域。
(2)这样一个遮罩同时为这两个图像生成,使用与步骤2中相同的转换,可以使图像2的遮罩转化为图像1的坐标空间。
(3)之后,通过一个element-wise最大值,这两个遮罩结合成一个。结合这两个遮罩是为了确保图像1被掩盖,而显现出图像2的特性。
最后,应用遮罩给出最终的图像如下图:

全部代码如下:
import cv2
import dlib
import numpy
import sys
sys.argv = ["faceswap.py","head2.jpg","face3.jpg"]
PREDICTOR_PATH = "shape_predictor_68_face_landmarks.dat"
SCALE_FACTOR = 1
FEATHER_AMOUNT = 11
FACE_POINTS = list(range(17, 68))
MOUTH_POINTS = list(range(48, 61))
RIGHT_BROW_POINTS = list(range(17, 22))
LEFT_BROW_POINTS = list(range(22, 27))
RIGHT_EYE_POINTS = list(range(36, 42))
LEFT_EYE_POINTS = list(range(42, 48))
NOSE_POINTS = list(range(27, 35))
JAW_POINTS = list(range(0, 17))
# 用于排列图像的点
ALIGN_POINTS = (LEFT_BROW_POINTS + RIGHT_EYE_POINTS + LEFT_EYE_POINTS +
RIGHT_BROW_POINTS + NOSE_POINTS + MOUTH_POINTS)
OVERLAY_POINTS = [
LEFT_EYE_POINTS + RIGHT_EYE_POINTS + LEFT_BROW_POINTS + RIGHT_BROW_POINTS,
NOSE_POINTS + MOUTH_POINTS,
]
# 颜色校正期间使用的模糊量, as a fraction of the
# pupillary distance.
COLOUR_CORRECT_BLUR_FRAC = 0.6
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(PREDICTOR_PATH)
class TooManyFaces(Exception):
pass
class NoFaces(Exception):
pass
def get_landmarks(im):
"""
将一个图像转化成numpy数组,并返回一个68×2元素矩阵,输入图像的每个特征点对应每行的一个x,y坐标
为一张图像和一个标记矩阵生成一个遮罩,它画出了两个白色的凸多边形:一个是眼睛周围的区域,一个是鼻子和嘴部周围的区域。之后它由11个像素向遮罩的边缘外部羽化扩展,可以帮助隐藏任何不连续的区域。
这样一个遮罩同时为这两个图像生成,使用与步骤2中相同的转换,可以使图像2的遮罩转化为图像1的坐标空间。
之后,通过一个element-wise最大值,这两个遮罩结合成一个。结合这两个遮罩是为了确保图像1被掩盖,而显现出图像2的特性。
:param im:
:return:
"""
rects = detector(im, 1)
if len(rects) > 1:
raise TooManyFaces
if len(rects) == 0:
raise NoFaces
return numpy.matrix([[p.x, p.y] for p in predictor(im, rects[0]).parts()])
def annotate_landmarks(im, landmarks):
im = im.copy()
for idx, point in enumerate(landmarks):
pos = (point[0, 0], point[0, 1])
cv2.putText(im, str(idx), pos,
fontFace=cv2.FONT_HERSHEY_SCRIPT_SIMPLEX,
fontScale=0.4,
color=(0, 0, 255))
cv2.circle(im, pos, 3, color=(0, 255, 255))
return im
def draw_convex_hull(im, points, color):
points = cv2.convexHull(points)
cv2.fillConvexPoly(im, points, color=color)
def get_face_mask(im, landmarks):
im = numpy.zeros(im.shape[:2], dtype=numpy.float64)
for group in OVERLAY_POINTS:
draw_convex_hull(im,
landmarks[group],
color=1)
im = numpy.array([im, im, im]).transpose((1, 2, 0))
im = (cv2.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0) > 0) * 1.0
im = cv2.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0)
return im
def transformation_from_points(points1, points2):
"""
Return an affine transformation [s * R | T] such that:
sum ||s*R*p1,i + T - p2,i||^2
is minimized.
1.将输入矩阵转换为浮点数。这是后续操作的基础。
2.每一个点集减去它的矩心。一旦为点集找到了一个最佳的缩放和旋转方法,这两个矩心 c1 和 c2 就可以用来找到完整的解决方案。
3.同样,每一个点集除以它的标准偏差。这会消除组件缩放偏差的问题。
4.使用奇异值分解计算旋转部分。可以在维基百科上看到关于解决正交 Procrustes 问题的细节。
5.利用仿射变换矩阵返回完整的转化。
"""
# Solve the procrustes problem by subtracting centroids, scaling by the
# standard deviation, and then using the SVD to calculate the rotation. See
# the following for more details:
# https://en.wikipedia.org/wiki/Orthogonal_Procrustes_problem
points1 = points1.astype(numpy.float64)
points2 = points2.astype(numpy.float64)
c1 = numpy.mean(points1, axis=0)
c2 = numpy.mean(points2, axis=0)
points1 -= c1
points2 -= c2
s1 = numpy.std(points1)
s2 = numpy.std(points2)
points1 /= s1
points2 /= s2
U, S, Vt = numpy.linalg.svd(points1.T * points2)
# The R we seek is in fact the transpose of the one given by U * Vt. This
# is because the above formulation assumes the matrix goes on the right
# (with row vectors) where as our solution requires the matrix to be on the
# left (with column vectors).
R = (U * Vt).T
return numpy.vstack([numpy.hstack(((s2 / s1) * R,
c2.T - (s2 / s1) * R * c1.T)),
numpy.matrix([0., 0., 1.])])
def read_im_and_landmarks(fname):
im = cv2.imread(fname, cv2.IMREAD_COLOR)
im = cv2.resize(im, (im.shape[1] * SCALE_FACTOR,
im.shape[0] * SCALE_FACTOR))
s = get_landmarks(im)
return im, s
def warp_im(im, M, dshape):
output_im = numpy.zeros(dshape, dtype=im.dtype)
cv2.warpAffine(im,
M[:2],
(dshape[1], dshape[0]),
dst=output_im,
borderMode=cv2.BORDER_TRANSPARENT,
flags=cv2.WARP_INVERSE_MAP)
return output_im
def correct_colours(im1, im2, landmarks1):
blur_amount = COLOUR_CORRECT_BLUR_FRAC * numpy.linalg.norm(
numpy.mean(landmarks1[LEFT_EYE_POINTS], axis=0) -
numpy.mean(landmarks1[RIGHT_EYE_POINTS], axis=0))
blur_amount = int(blur_amount)
if blur_amount % 2 == 0:
blur_amount += 1
im1_blur = cv2.GaussianBlur(im1, (blur_amount, blur_amount), 0)
im2_blur = cv2.GaussianBlur(im2, (blur_amount, blur_amount), 0)
# Avoid divide-by-zero errors.
im2_blur += (128 * (im2_blur <= 1.0)).astype(im2_blur.dtype)
return (im2.astype(numpy.float64) * im1_blur.astype(numpy.float64) /
im2_blur.astype(numpy.float64))
im1, landmarks1 = read_im_and_landmarks(sys.argv[1])
im2, landmarks2 = read_im_and_landmarks(sys.argv[2])
M = transformation_from_points(landmarks1[ALIGN_POINTS],
landmarks2[ALIGN_POINTS])
mask = get_face_mask(im2, landmarks2)
warped_mask = warp_im(mask, M, im1.shape)
combined_mask = numpy.max([get_face_mask(im1, landmarks1), warped_mask],
axis=0)
warped_im2 = warp_im(im2, M, im1.shape)
warped_corrected_im2 = correct_colours(im1, warped_im2, landmarks1)
output_im = im1 * (1.0 - combined_mask) + warped_corrected_im2 * combined_mask #应用遮罩
cv2.imwrite('output2.jpg', output_im)至此简单的换脸的功能便实现了,大家可以自己试试。