一、文档资料
二、整体流程
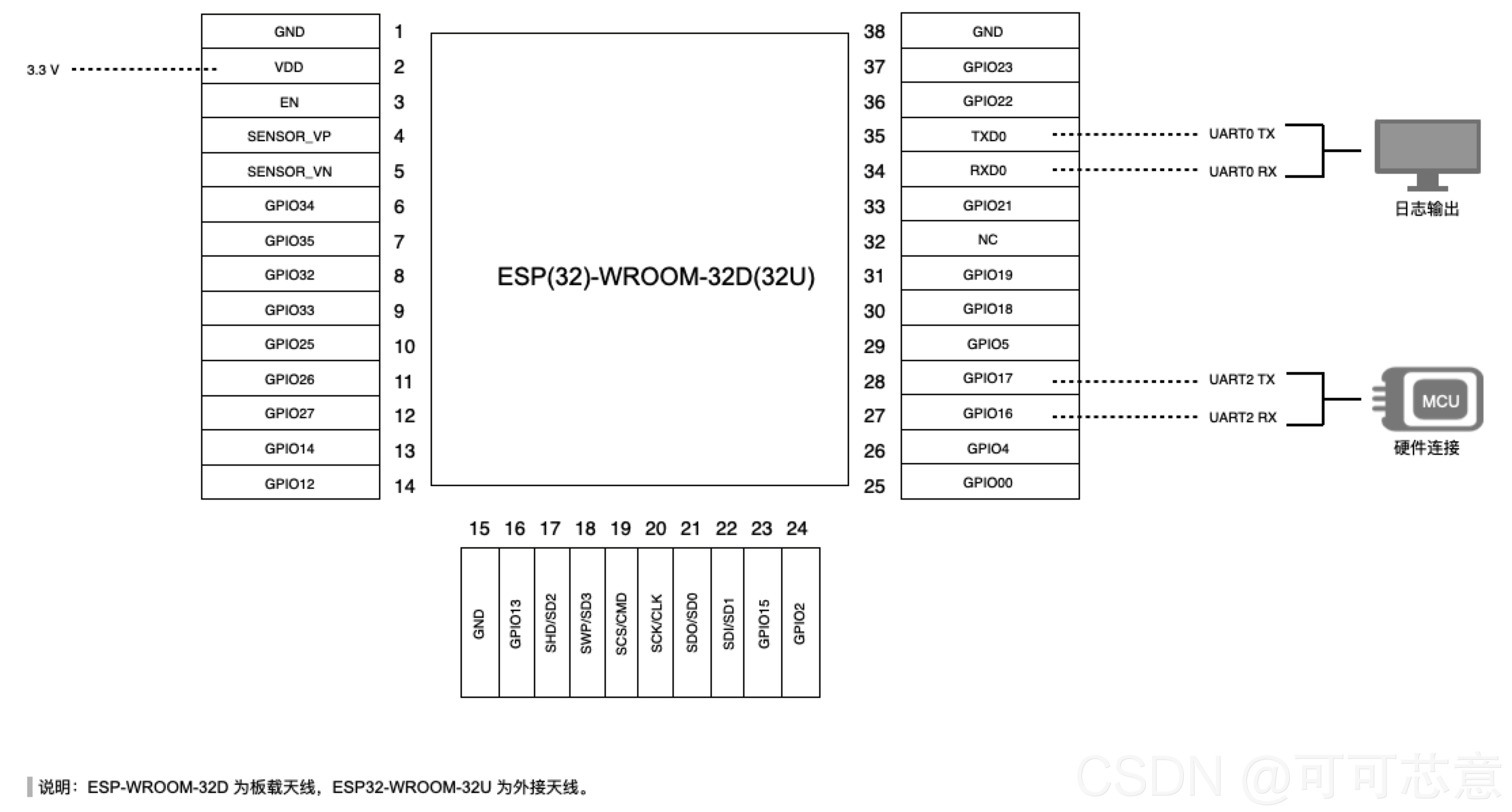
- 引脚
- 命令列表(注意\r结尾)
其中,restore 用于重新配置模组,类似于出厂了,出厂后,设备进入ap模式
arch
ble_config
ble_event
ble_fastpair
ble_linkage
call
config_router
country_code
echo
error
event
event_occured
factory
get_down
getwifi
help
json_ack
json_get_down
json_send
log
mac
mcu_version
model
net
properties_changed
props
reboot
restore
result
set_mcu_auto_ota
setwifi
store
time
update_me
version
- 上电先发送model
- 周期性发送get_down
属性格式如下:uid pid 数据
注意布尔类型,是 true 和 flse,字符串类型,需要加上 “”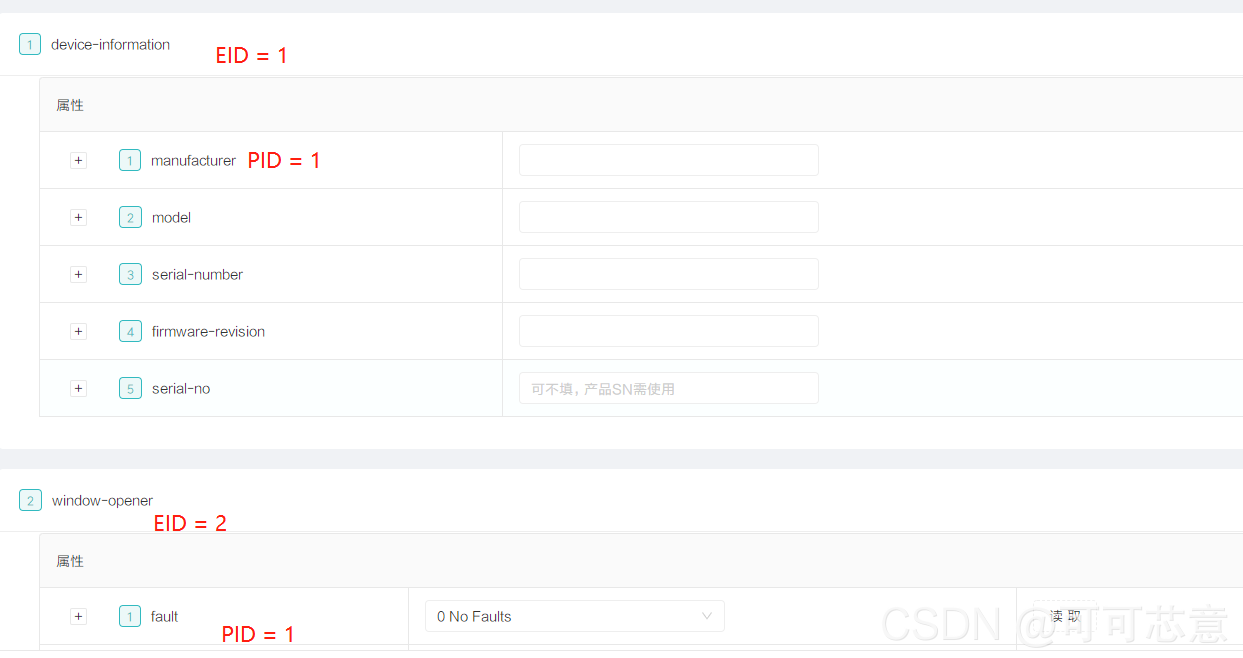
设置属性:这里一共有2个属性
第一个是 1 1 ,数值是10
第二个是 1 88 ,数值是 字符串数据
对于下发的数据,必须回复 result
格式:result uid pid 返回码(0为成功)
↑ get_down
↓ down set_properties 1 1 10 1 88 "str_value"
↑ result 1 1 0 1 88 -4003
获取属性:
第一个是 1 2
第二个是 1 3
必须回复 result
格式:result uid pid 返回码(0为成功) 数值
↑ get_down
↓ down get_properties 1 2 1 3
↑ result 1 2 0 10 1 3 0 "str_value"
上报属性:
↑properties_changed 1 1 10
↓ok
- 周期性通过 net 查询当前网络状态,也可以通过 get_down返回的mii状态判断、
三、整体测试代码(含串口逻辑)
/**
******************************************************************************
* @file main.c
* @author AE team
* @version V1.1.1
* @date 15/05/2019
* @brief
******************************************************************************
* @copy
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, MindMotion SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2019 MindMotion</center></h2>
*/
#include "HAL_device.h"
#include "HAL_conf.h"
#include "stdio.h"
#include "string.h"
#define LED2_ON() GPIO_SetBits(GPIOA,GPIO_Pin_2) // PB4
#define LED2_OFF() GPIO_ResetBits(GPIOA,GPIO_Pin_2) // PB4
#define LED2_TOGGLE() (GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_2))?(GPIO_ResetBits(GPIOA,GPIO_Pin_2)):(GPIO_SetBits(GPIOA,GPIO_Pin_2)) // PB4
#define LED1_ON() GPIO_SetBits(GPIOA,GPIO_Pin_1) // PB5
#define LED1_OFF() GPIO_ResetBits(GPIOA,GPIO_Pin_1) // PB5
#define LED1_TOGGLE() (GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_1))?(GPIO_ResetBits(GPIOA,GPIO_Pin_1)):(GPIO_SetBits(GPIOA,GPIO_Pin_1)) // PB5
#define KEY1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4)
#define KEY2 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_7)
void LED_Init(void);
void Tim1_UPCount_init(u16 Prescaler, u16 Period);
extern u32 SystemCoreClock;
unsigned int uiCnt = 0;
u8 timeflag = 0;
uint16_t time_cont;
char printBuf[100];
uint16_t uart_cont = 0;
uint8_t uart_timeout_cont = 0;
#define UART_BUFF_LEN 200 //定义最大接收字节数 200
uint8_t uart_buf[UART_BUFF_LEN];
//单位1ms
#define WIFI_MODEL_UPLOAD_TIME 100 //电后 100ms后上报
#define WIFI_INQUIRE_PEROID 100//数据查询周期,要一直获取
#define WIFI_DATA_UPLOAD_PEROID 1000//1秒上报一次数据
#define WIFI_CHECK_PEROID 1000//1秒检测一次wifi状态
#define KEY_SHORT_PRESS_TIME 30 //短按30ms
#define KEY_LONG_PRESS_TIME 2000 //长按两秒
#define MI_MODEL "model 这里填模块名字" //对应项目模块名字
uint8_t net_conn_flag = 0;//是否联网成功
uint16_t wifi_inquire_cont = 0,wifi_model_upload_cont = 1,wifi_check_cont = 0,wifi_data_upload_cont;
uint16_t key1_cont;
uint8_t key1_state = 0;
/********************************************************************************************************
**函数信息 TIM1_BRK_UP_TRG_COM_IRQHandler(void)
**功能描述 :等待定时器溢出,产生中断
**输入参数 :无
**输出参数 :无
********************************************************************************************************/
void TIM1_BRK_UP_TRG_COM_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) {
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
time_cont ++ ;
if(uart_timeout_cont)uart_timeout_cont++;//串口超时计数
wifi_inquire_cont++;//wifi心跳
wifi_check_cont ++; //检测网络状态
wifi_data_upload_cont++;//数据上报
key1_cont ++ ;//按键
if(wifi_model_upload_cont)wifi_model_upload_cont++;//上电后多久上报一次model 只使用一次
}
}
void Tim1_Int_Enable(void)
{
NVIC_InitTypeDef NVIC_StructInit;
//config Tim1 interrupt
NVIC_StructInit.NVIC_IRQChannel = TIM1_BRK_UP_TRG_COM_IRQn;
NVIC_StructInit.NVIC_IRQChannelPriority = 1;
NVIC_StructInit.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_StructInit);
TIM_ClearFlag(TIM1, TIM_FLAG_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
}
/********************************************************************************************************
**函数信息 :void Tim1_UPCount_init(u16 Period,u16 Prescaler)
**功能描述 :配置定时器1向上计数模式
**输入参数 :Period 16位计数器重载值,Prescaler 时钟预分频值
**输出参数 :无
********************************************************************************************************/
void Tim1_UPCount_init(u16 Prescaler, u16 Period)
{
TIM_TimeBaseInitTypeDef TIM_StructInit;
/*使能TIM1时钟,默认时钟源为PCLK2(PCLK2未分频时不倍频,否则由PCLK2倍频输出),可选其它时钟源*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
TIM_TimeBaseStructInit(&TIM_StructInit);
TIM_StructInit.TIM_Period = Period; //ARR寄存器值
TIM_StructInit.TIM_Prescaler = Prescaler; //预分频值
/*数字滤波器采样频率,不影响定时器时钟*/
TIM_StructInit.TIM_ClockDivision = TIM_CKD_DIV1; //采样分频值
TIM_StructInit.TIM_CounterMode = TIM_CounterMode_Up; //计数模式
TIM_StructInit.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_StructInit);
TIM_ARRPreloadConfig(TIM1, ENABLE);
Tim1_Int_Enable();
TIM_Cmd(TIM1, ENABLE);
}
/*******************************************************************************
* @name : GPIO_Clock_Set
* @brief : RCC clock set
* @param : Portx , State
* @retval : void
*******************************************************************************/
void GPIO_Clock_Set(GPIO_TypeDef* GPIOx, FunctionalState NewState)
{
if(GPIOx == GPIOA) {
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, NewState); //GPIO clock starts
}
if(GPIOx == GPIOB) {
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, NewState); //GPIO clock starts
}
if(GPIOx == GPIOC) {
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC, NewState); //GPIO clock starts
}
if(GPIOx == GPIOD) {
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOD, NewState); //GPIO clock starts
}
}
/********************************************************************************************************
**函数信息 :LED_Init(void)
**功能描述 :LED初始化
**输入参数 :无
**输出参数 :无
********************************************************************************************************/
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_Clock_Set(GPIOA, ENABLE); //开启GPIOA时钟
// GPIO_Clock_Set(GPIOB, ENABLE); //开启GPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
LED1_ON();
LED2_OFF();
}
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_Clock_Set(GPIOA, ENABLE); //开启GPIOA时钟
// GPIO_Clock_Set(GPIOB, ENABLE); //开启GPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/********************************************************************************************************
**函数信息 :void uart_nvic_init(u32 bound)
**功能描述 :UART端口、中断初始化
**输入参数 :bound
**输出参数 :
** 备注 :
********************************************************************************************************/
void uart_nvic_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
UART_InitTypeDef UART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE); //使能UART1
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); //开启GPIOA时钟
//UART1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//UART 初始化设置
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1);
UART_InitStructure.UART_BaudRate = bound; //串口波特率
UART_InitStructure.UART_WordLength = UART_WordLength_8b; //字长为8位数据格式
UART_InitStructure.UART_StopBits = UART_StopBits_1; //一个停止位
UART_InitStructure.UART_Parity = UART_Parity_No; //无奇偶校验位
UART_InitStructure.UART_HardwareFlowControl = UART_HardwareFlowControl_None;//无硬件数据流控制
UART_InitStructure.UART_Mode = UART_Mode_Rx | UART_Mode_Tx; //收发模式
UART_Init(UART1, &UART_InitStructure); //初始化串口1
UART_ITConfig(UART1, UART_IT_RXIEN, ENABLE); //开启串口接受中断
UART_Cmd(UART1, ENABLE); //使能串口1
//UART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.9
//UART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.10
}
/********************************************************************************************************
**函数信息 :void UART1_IRQHandler(void)
**功能描述 :串口1中断服务程序
**输入参数 :
**输出参数 :
** 备注 :
********************************************************************************************************/
void UART1_IRQHandler(void)
{
u8 Res;
if(UART_GetITStatus(UART1, UART_IT_RXIEN) != RESET) { //接收中断(接收到的数据必须是0x0d 0x0a结尾)
UART_ClearITPendingBit(UART1, UART_IT_RXIEN);
Res = UART_ReceiveData(UART1); //读取接收到的数据
if(uart_cont < UART_BUFF_LEN)
uart_buf[uart_cont++] = Res;
uart_timeout_cont = 1;
}
}
/********************************************************************************************************
**函数信息 :void UartSendByte(u8 dat)
**功能描述 :UART发送数据
**输入参数 :dat
**输出参数 :
** 备注 :
********************************************************************************************************/
void UartSendByte(u8 dat)
{
UART_SendData(UART1, dat);
while(!UART_GetFlagStatus(UART1, UART_FLAG_TXEPT));
}
/********************************************************************************************************
**函数信息 :void UartSendGroup(u8* buf,u16 len)
**功能描述 :UART发送数据
**输入参数 :buf,len
**输出参数 :
** 备注 :
********************************************************************************************************/
void UartSendGroup(u8* buf, u16 len)
{
while(len--)
UartSendByte(*buf++);
}
/*
上报model ,每次上电先传过去
*/
void mi_model_upload()
{
uint8_t data[50];
sprintf((char *)data,"model %s\n",MI_MODEL);
UartSendGroup(data,strlen((char *)data));
}
/*
数据上报
输入为2个ID和数据,注意ID和C都实用ascii码数字 例如 '1' '2',注意总长度别超过256,这里暂时没限制
*/
void mi_data_upload(uint8_t eid,uint8_t pid , uint8_t *value)
{
uint8_t data[256];
sprintf((char *)data,"properties_changed %c %c %s\r",eid,pid,value);
UartSendGroup(data,strlen((char *)data));
}
/* 周期性获取数据,类似于心跳必须发 建议 100ms */
void mi_inquire()
{
UartSendGroup((uint8_t *)"get_down\r",strlen((char *)"get_down\r"));
}
/* 每1秒查询一次网络状态具体可以自己来*/
void mi_net()
{
UartSendGroup((uint8_t *)"net\r",strlen((char *)"nte\r"));
}
/* 重置WIFI */
void mi_restore()
{
UartSendGroup((uint8_t *)"restore\r",strlen((char *)"restore\r"));
}
/*
解析串口数据
*/
void mi_data_prase(uint8_t *data)
{
if(strstr((char *)data,"get_properties"))//平台获取数据 注意这个函数只支持 1-9 的eid和 1-9的pid 因为只是简单实用位置去操作
{
//down get_properties 1 2
//p+20 = eid
//p+22 = pid
uint8_t eid,pid;//pid
uint8_t res_data[50],res_value[30];//回复的串口数据
memset(res_data,0,sizeof(res_data));//回复的属性数据
memset(res_value,0,sizeof(res_value));
memcpy(res_value,"1",1);//随便先填一个数据上去
eid = data[20];
pid = data[22];
//针对不同的pid 需要发送特定的数据回去 如果是bool类型需要传 true等等
switch(eid)//先判断eid
{
case '2':
{
if(pid == '1')
{
//针对不同的pid 需要发送特定的数据回去 如果是bool类型需要传 true等等
strcpy((char *)res_value,"1");
}
else if(pid == '6')//2 - 6
{
strcpy((char *)res_value,"55");
}
}
break;
case '5':
{
if(pid == '5')
{
//针对不同的pid 需要发送特定的数据回去 如果是bool类型需要传 true等等
strcpy((char *)res_value,"1300");
}
}
break;
default:
{
}
break;
}
sprintf((char *)res_data,"result %s 0 %s\r",data+20,res_value);
UartSendGroup(res_data,strlen((char *)res_data));
//回复OK
//result 5 3 0
}
else if(strstr((char *)data,"set_properties"))//平台设置数据
{
uint8_t eid,pid;
uint8_t res_data[50];//回复的数据
char *p;
eid = data[20];
pid = data[22];
switch(eid)//先判断eid
{
case '2':
{
if(pid == '1')
{
//数据位于 data[24] 一直到结尾
}
else if(pid == '2')
{
}
}
break;
default:
{
}
break;
}
p = strchr(data+22,' ');//找到第二个iid后面的空格
*p = 0;//空格给 0
sprintf((char *)res_data,"result %s 0\r",data+20);
UartSendGroup(res_data,strlen((char *)res_data));
//回复OK
}
//offline-连接中(或掉线);
//local-连上路由器但未连上小米云服务器;
//updating-固件升级中、uap模式等待连接、unprov-关闭wifi(半小时未快连)。
else if( 0 == strcmp((char *)data,"offline"))//离线状态
{
net_conn_flag = 0;
}
else if(0 == strcmp((char *)data,"uap"))//配网状态
{
net_conn_flag = 1;
}
else if(0 == strcmp((char *)data,"local"))//连接wifi成功,正在连平台
{
net_conn_flag = 2;
}
else if(0 == strcmp((char *)data,"cloud"))//检测WIFI状态
{
net_conn_flag = 3;
}
}
/********************************************************************************************************
**函数信息 :main(void)
**功能描述 :
**输入参数 :无
**输出参数 :无
********************************************************************************************************/
int main(void)
{
uint8_t upload_data[50];
LED_Init();
uart_nvic_init(115200);//串口115200 带中断
Tim1_UPCount_init(SystemCoreClock / 10000 - 1, 10);//1ms
while(1)
{
/* LED处理 判断网络状态 */
switch(net_conn_flag)
{
case 0:
{
LED2_OFF();
}
break;
case 1:
{
if(time_cont >= 1000)
{
LED2_TOGGLE();
time_cont = 0;
}
}
break;
case 2:
{
if(time_cont >= 200)
{
LED2_TOGGLE();
time_cont = 0;
}
}
break;
case 3:
{
LED2_ON();
}
break;
default:
{
}
break;
}
/* 按键处理 */
switch(key1_state)
{
case 0:
{
if(!KEY1)
{
if(key1_cont >= KEY_LONG_PRESS_TIME)
{
mi_restore();
key1_cont = 0;
key1_state = 1;
}
}
else
{
key1_cont = 0;
}
}
break;
case 1://等待松手
{
if(KEY1) key1_state = 0;
}
break;
default:
break;
}
/* 串口处理 */
if(uart_timeout_cont >= 3)//串口数据30ms超时
{
uart_buf[uart_cont-1] = 0;//直接将 \r先干掉
// uart_buf[uart_cont] = 0;
mi_data_prase(uart_buf);///>处理收到的wifi数据
uart_cont = 0;
uart_timeout_cont = 0;
}
/*wifi处理*/
if(wifi_model_upload_cont > WIFI_MODEL_UPLOAD_TIME)//上报一次的model,上电后只执行一次
{
mi_model_upload();
wifi_model_upload_cont = 0;
}
if(wifi_inquire_cont >= WIFI_INQUIRE_PEROID)//数据处理周期
{
mi_inquire();
wifi_inquire_cont = 0;
}
if(wifi_check_cont >= WIFI_CHECK_PEROID)//检测WIFI状态
{
wifi_check_cont = 0;
mi_net();
}
if(wifi_data_upload_cont >= WIFI_DATA_UPLOAD_PEROID)
{
wifi_data_upload_cont = 0;
/*
数据上传测试
uiCnt++;
memset(upload_data,0,sizeof(upload_data));
sprintf(upload_data,"%d",uiCnt);
mi_data_upload('5','7',upload_data);
*/
}
}
}
int fputc(int ch, FILE* stream)
{
//USART_SendData(USART1, (unsigned char) ch);
//while (!(USART1->SR & USART_FLAG_TXE));
UART_SendData(UART1, ch);
while(!UART_GetFlagStatus(UART1, UART_FLAG_TXEPT));
return ch;
}
/**
* @}
*/
/**
* @}
*/
/**
* @}
*/
/*-------------------------(C) COPYRIGHT 2019 MindMotion ----------------------*/
版权声明:本文为xuan530482366原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。