这个解决方法是我在群里看到的,近期装了很多次ros都能完美解决,特地转载出来分享给大家,也给自己mark一下。
在安装ROS的过程中,很多同学在执行上述指令时会提示以下错误:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.通常的解决办法是用手机热点
或者查询
https://raw.githubusercontent.com的实际IP地址,但是也有可能会失效。
偶然的机会看到一教程的解决方案。
博主的思路是新思路:将相关资源备份到 gitee,修改 rosdep 源码,重新定位资源。成功率是百分百。
整理修改后提供解决ROS rosdep init/update报错的方法(终极版)。
步骤1
进入到 sources.list.d 文件夹(如果没有,则用mkdir指令新建)
修改 gedit 20-default.list
cd /etc/ros/rosdep/sources.list.d
sudo gedit 20-default.list 将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master
修改前:
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead修改后:
# os-specific listings first rosdep update
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/base.yaml
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/python.yaml
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/ruby.yaml
gbpdistro https://gitee.com/wybros/rosdistro/raw/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead步骤2
进入到 rosdep2 文件夹,
修改 gbpdistro_support.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit gbpdistro_support.py将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master
修改后如下
FUERTE_GBPDISTRO_URL = 'https://gitee.com/wybros/rosdistro/raw/' \
'master/releases/fuerte.yaml'步骤3
进入到 rosdep2 文件夹,
修改 rep3.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit rep3.py将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master
修改后如下
REP3_TARGETS_URL = 'https://gitee.com/wybros/rosdistro/raw/master/releases/targets.yaml'步骤4
进入到 rosdep2 文件夹,
修改 sources_list.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit sources_list.py将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master
修改后如下
DEFAULT_SOURCES_LIST_URL = 'https://gitee.com/wybros/rosdistro/raw/master/rosdep/sources.list.d/20-default.list'步骤5
进入到 rosdistro 文件夹
修改 __init__.py
cd /usr/lib/python2.7/dist-packages/rosdistro/
sudo gedit __init__.py将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master
修改后如下
DEFAULT_INDEX_URL = 'https://gitee.com/wybros/rosdistro/raw/master/index-v4.yaml'最后
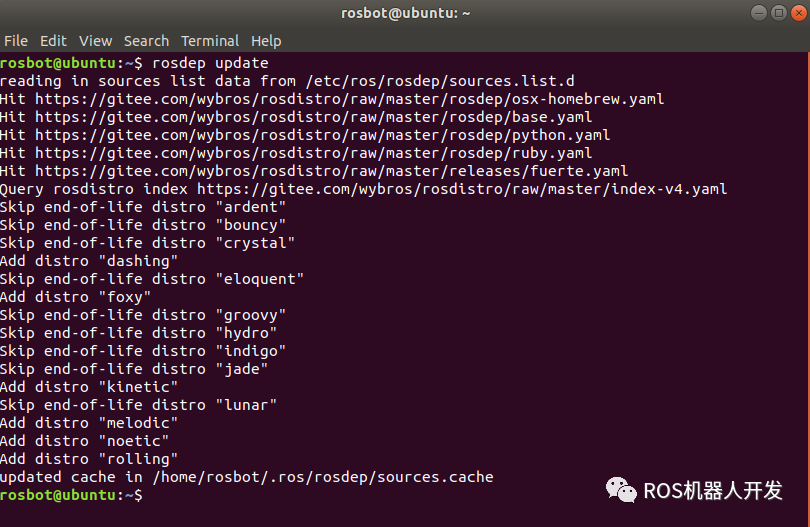
打开新终端执行
rosdep update如果出现如下提示则表示成功!
建议小伙伴们收藏起来,毕竟鬼知道哪天就要装一下ROS了,另外如果好用的话,麻烦给博主点个赞吧,多谢啦~~~