一、温度传感器
什么是温度传感器?
温度传感器是一种测量物体冷热程度的设备,以可读的形式通过电信号提供温度测量。比较常见的是热电偶和电阻温度检测器。
温度传感器类型
在实际应用中,有许多的温度传感器可以用,根据实际应用具有不同的特性,温度传感器由两种基本物理类型组成:
接触式温度传感器类型——这些类型的温度传感器需要与被感测对象物理接触,并使用传导来监测温度变化。它们可用于在很宽的温度范围内检测固体、液体或气体。
非接触式温度传感器类型——这些类型的温度传感器使用对流和辐射来监测温度变化。它们可用于检测液体和气体,这些液体和气体随着热量的升高和冷在对流中沉降到底部而发射辐射能,或者检测以红外辐射(太阳)形式从物体传输的辐射能。
接触式和非接触式温度传感器进一步分为以下温度传感器,接下来将对这些温度传感器的原理进行解释
温度传感器原理
一、温度传感器工作原理--恒温器
恒温器是一种接触式温度传感器,由两种不同金属(如铝、铜、镍或钨)组成的双金属条组成。
两种金属的线性膨胀系数的差异导致它们在受热时产生机械弯曲运动。

恒温器实物图
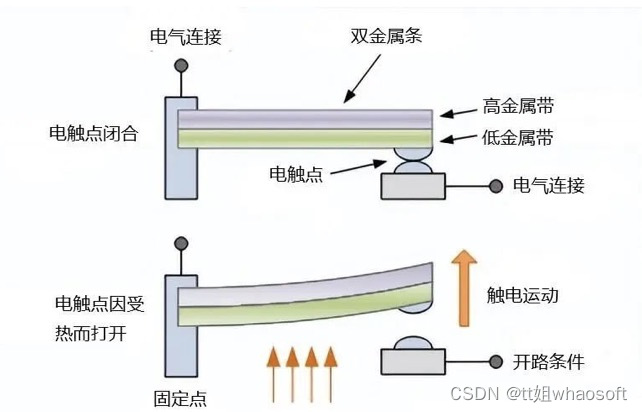
一、温度传感器工作原理--双金属恒温器
恒温器由两种热度不同的金属背靠背粘在一起组成。当天气寒冷时,触点闭合,电流通过恒温器。当它变热时,一种金属比另一种金属膨胀得更多,粘合的双金属条向上(或向下)弯曲,打开触点,防止电流流动。

双金属恒温器实物图
有两种主要类型的双金属条,主要基于它们在受到温度变化时的运动。有在设定温度点对电触点产生瞬时“开/关”或“关/开”类型动作的“速动”类型,以及逐渐改变其位置的较慢“蠕变”类型随着温度的变化。
双金属恒温器工作原理图
速动型恒温器通常用于我们家中,用于控制烤箱、熨斗、浸入式热水箱的温度设定点,也可以在墙上找到它们来控制家庭供暖系统。
爬行器类型通常由双金属线圈或螺旋组成,随着温度的变化缓慢展开或盘绕。一般来说,爬行型双金属条对温度变化比标准的按扣开/关类型更敏感,因为条更长更薄,非常适合用于温度计和表盘等。
二、温度传感器工作原理--热敏电阻
热敏电阻通常由陶瓷材料制成,例如镀在玻璃中的镍、锰或钴的氧化物,这使得它们很容易损坏。与速动类型相比,它们的主要优势在于它们对温度、准确性和可重复性的任何变化的响应速度。
大多数热敏电阻具有负温度系数(NTC),这意味着它们的电阻随着温度的升高而降低。但是,有一些热敏电阻具有正温度系数 (PTC),并且它们的电阻随着温度的升高而增加。

热敏电阻实物图
热敏电阻的额定值取决于它们在室温下的电阻值(通常为 25 o C)、它们的时间常数(对温度变化作出反应的时间)以及它们相对于流过它们的电流的额定功率。与电阻一样,热敏电阻在室温下的电阻值从 10 兆欧到几欧姆不等,但出于传感目的,通常使用以千欧为单位的那些类型。
温度传感器示例 No1
以下热敏电阻在 25℃ 时的电阻值为 10KΩ,在 100℃时的电阻值为 100Ω 。当与 1kΩ 电阻器串联时,计算热敏电阻两端的电压降,从而计算两种温度下的输出电压 (Vout)跨过 12v 电源。
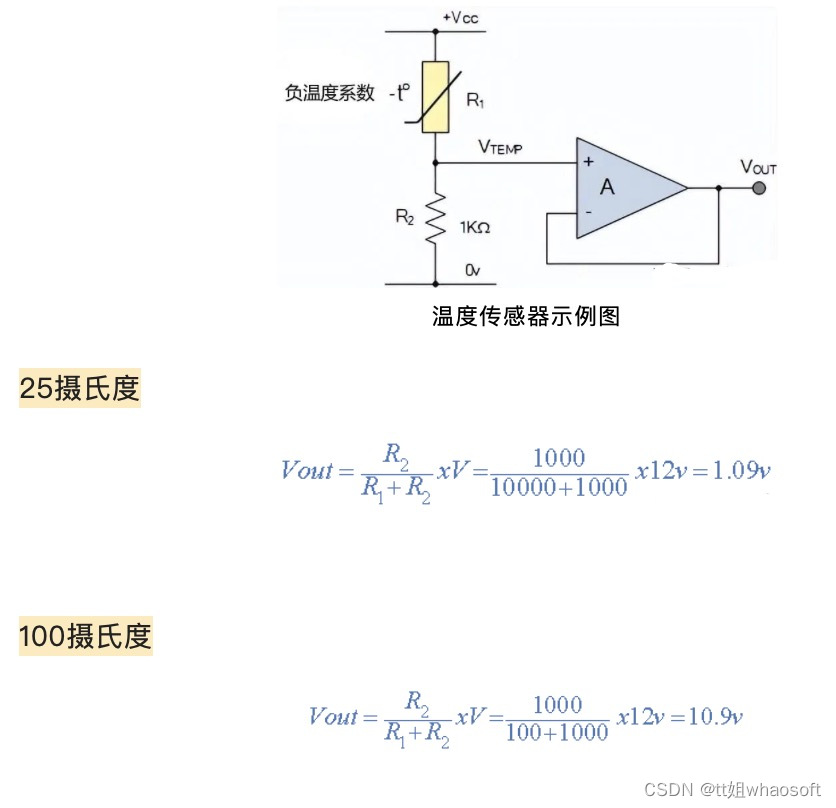
通过将 R2 的固定电阻值(在我们的示例中为 1kΩ)更改为电位计或预设值,可以在预定的温度设定点获得电压输出,例如 60℃ 时的 5v 输出,并通过改变电位计获得特定的输出电压水平可以在更宽的温度范围内获得。
但是需要注意的是,热敏电阻是非线性器件,不同热敏电阻在室温下的标准电阻值是不同的,这主要是由于它们是由半导体材料制成的。热敏电阻随温度呈指数变化,因此具有 Beta 温度常数 ( β ),可用于计算任何给定温度点的电阻。
然而,当与串联电阻一起使用时,例如在分压器网络或惠斯通电桥型布置中,响应于施加到分压器/电桥网络的电压而获得的电流与温度成线性关系。然后,电阻两端的输出电压与温度成线性关系。
三、温度传感器工作原理--电阻式温度检测器(RTD)
RTD 是精确的温度传感器,由高纯度导电金属(如铂、铜或镍)绕成线圈制成。RTD 的电阻变化类似于热敏电阻。也可提供薄膜 RTD。这些器件有一层薄薄的铂膏沉积在白色陶瓷基板上。

电阻温度检测器或RTD实物图
电阻式温度检测器具有正温度系数 (PTC),但与热敏电阻不同,它们的输出非常线性,可产生非常准确的温度测量值。
但是,它们的热灵敏度非常差,即温度变化只会产生非常小的输出变化,例如 1Ω/ o C。
更常见的 RTD 类型由铂制成,称为铂电阻温度计或PRT,其中最常见的是 Pt100 传感器,其在 0 ℃时的标准电阻值为 100Ω。缺点是铂价格昂贵,这种设备的主要缺点之一是其成本。
与热敏电阻一样,RTD 是无源电阻器件,通过使恒定电流通过温度传感器,可以获得随温度线性增加的输出电压。典型的 RTD 在 0 ℃ 时的基极电阻约为 100Ω,在 100 ℃ 时增加到约 140 Ω,工作温度范围在 -200 至 +600 ℃ 之间。
因为 RTD 是一个电阻设备,我们需要让电流通过它们并监控产生的电压。然而,当电流流过电阻线时,由于电阻线的自热引起的任何电阻变化, I2 R ,(欧姆定律)都会导致读数错误。为避免这种情况,RTD 通常连接到惠斯通电桥网络,该网络具有用于引线补偿和/或连接到恒流源的附加连接线。

电阻式温度传感器实物图
四、温度传感器工作原理--热电偶
最常见的温度传感器之一包括热电偶,因为它们具有宽温度工作范围、可靠性、准确性、简单性和灵敏度。主要是由于其体积小。热电偶还具有所有温度传感器中最宽的温度范围,从低于 -200 ℃ 到远高于 2000 ℃ 。
热电偶通常由焊接或压接在一起的不同金属(例如铜和康铜)的两个接头组成。其中一个称为冷端,保持在特定温度,而另一个是测量端,称为热端。
在受到温度影响时,会在结上产生电压降。
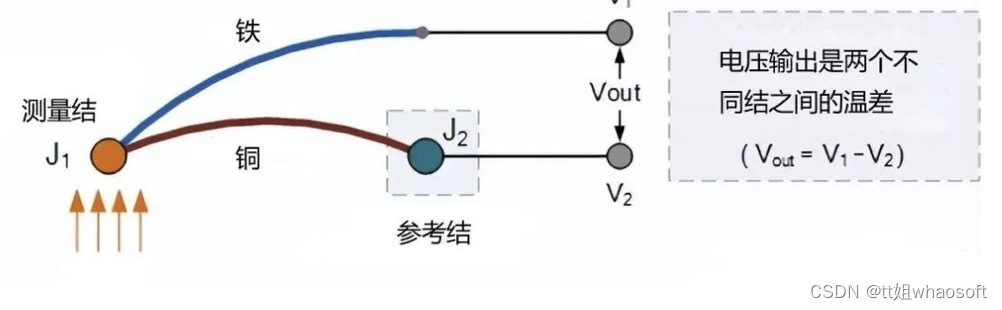
热电偶是热电传感器,基本上由焊接或压接在一起的不同金属(例如铜和康铜)的两个接头组成。一个结保持在恒温,称为参考(冷)结,而另一个为测量(热)结。当两个结处于不同温度时,会在结上产生电压,用于测量温度传感器,如下所示。

热电偶实物图
热电偶结构
热电偶的工作原理非常简单和基本。当两种不同金属(例如铜和康铜)熔合在一起时,会产生“热电”效应,从而在它们之间产生只有几毫伏 (mV) 的恒定电位差。两个结之间的电压差称为“塞贝克效应”,因为沿导线产生温度梯度,从而产生电动势。那么热电偶的输出电压是温度变化的函数。
如果两个结处于相同温度,则两个结之间的电势差为零,换句话说,没有电压输出,因为V1 = V2。但是,当结点连接在电路中并且都处于不同温度时,将检测到相对于两个结点之间的温差V1 – V2的电压输出。这种电压差会随着温度的升高而增加,直到达到结的峰值电压水平,这是由所使用的两种不同金属的特性决定的。
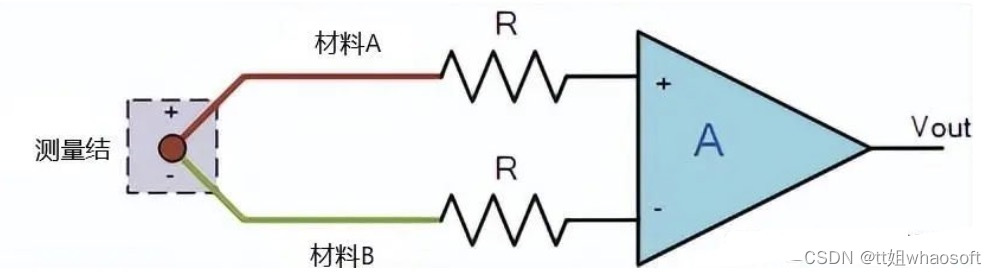
热电偶放大
需要仔细选择放大器的类型,无论是离散的还是运算放大器的形式,因为需要良好的漂移稳定性来防止热电偶频繁地重新校准。这使得斩波器和仪表类型的放大器更适合大多数温度传感应用。
五、基于半导体的温度传感器
基于半导体的温度传感器与双集成电路 (IC) 一起工作。它们包含两个具有温度敏感电压和电流特性的类似二极管,以有效测量温度变化。
但是,它们提供线性输出,但在 1 °C 至 5 °C 时精度较低。它们还在最窄的温度范围(-70 °C 至 150 °C)内表现出最慢的响应速度(5 秒至 60 秒)。
五、基于半导体的温度传感器--0V型振弦式温度传感器
0V型振弦式温度计用于测量混凝土结构或水中的内部温度。它的分辨率优于 0.1°C,工作原理类似于热电偶温度传感器。它还具有 -20 o至 80 o C的高温范围。

0V型振弦式温度计实物图
五、基于半导体的温度传感器--ETT-10TH 型电阻热敏电阻探头
ETT-10TH 型电阻温度探头是一种低质量防水温度探头,用于测量 –20 至 80°C 之间的温度。由于其低热质量,它具有快速响应时间。
ETT-10TH型电阻温度探头专为测量钢材表面温度和测量混凝土结构表面温度而设计。ETT-10TH 可以嵌入混凝土中,用于测量混凝土内部的整体温度,甚至可以在水下工作。
ETT-10TH 电阻温度探头是完全可互换的。在指定的工作温度范围内,温度读数的差异不会超过 1°C。这允许单个指示器与任何 ETT-10TH 探头一起使用而无需重新校准。

ETT-10TH 型电阻温度探头实物图
ETT-10TH 型电阻热敏电阻探头如何工作?
ETT-10TH 温度探头由一个电阻-温度曲线匹配的热敏电阻环氧树脂封装在铜管中,以实现更快的热响应和环境保护。管子的尖端是扁平的,因此它可以固定在任何相当平坦的金属或混凝土表面上,以测量表面温度。
借助容易获得的两部分环氧树脂粘合剂,探头的扁平尖端可以固定在大多数表面上。如果需要,探头也可以用螺栓固定在结构表面上。
五、基于半导体的温度传感器--ETT-10PT 型 RTD 温度探头
ETT-10PT RTD(电阻温度检测器)温度探头由具有 DIN IEC 751(原 DIN 43760)欧洲曲线校准的陶瓷电阻元件 (Pt. 100) 组成。电阻元件安装在封闭端坚固的不锈钢管中,可保护元件免受湿气影响。

ETT-10PT RTD(电阻温度检测器)温度探头实物图
ETT-10PT 型 RTD 温度探头如何工作?
电阻温度探头的工作原理是传感器电阻是感测温度的函数。铂 RTD 具有非常好的准确度、线性度、稳定性和可重复性。
ETT-10PT 型电阻温度探头配有三芯屏蔽电缆。红线提供一个连接,两根黑线一起提供另一个。因此,实现了对引线电阻和引线电阻温度变化的补偿。使用数字 RTD 温度指示器可以轻松读取电阻温度传感器读数。
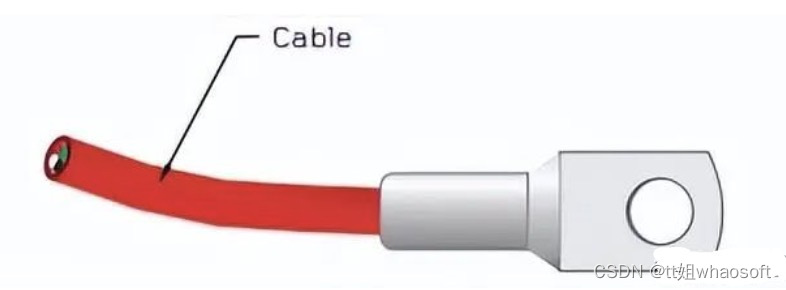
ETT-10PT 型 RTD 温度探头实物图
whaosoft aiot http://143ai.com
二、CAN总线协议详解
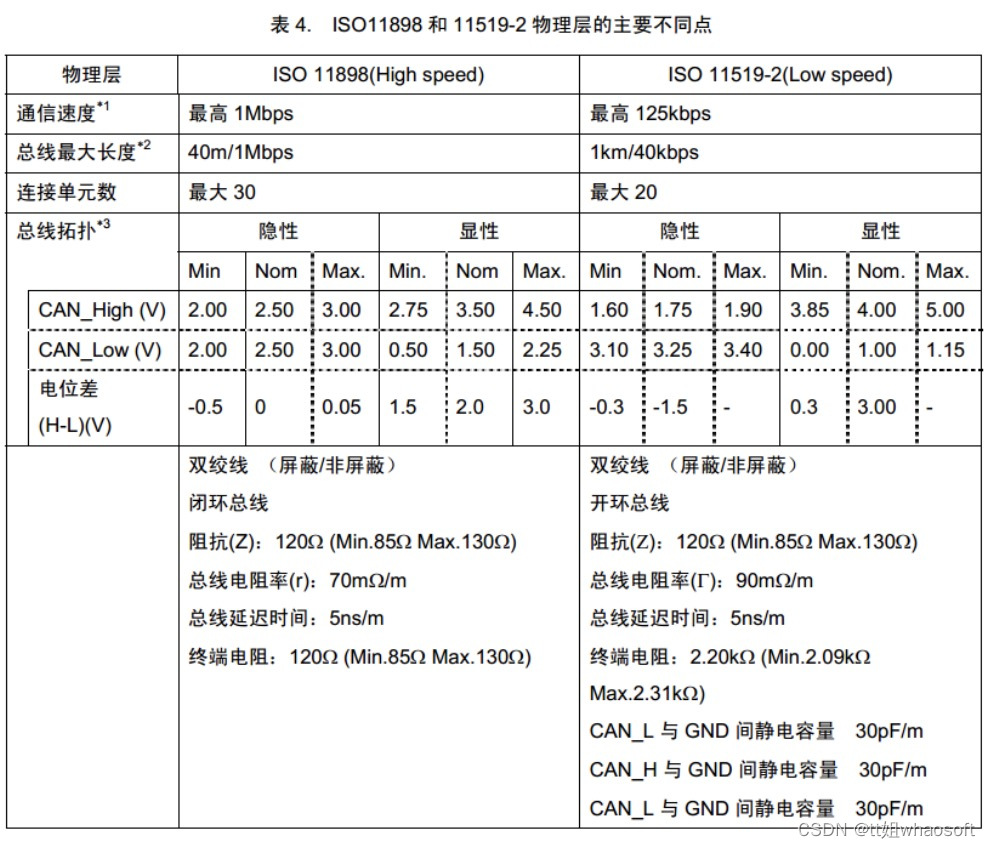
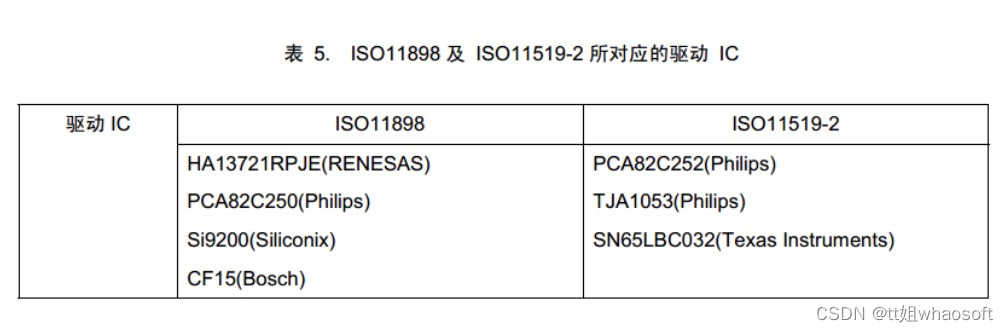
CAN 是控制器局域网络 (Controller Area Network) 的简称,它是由研发和生产汽车电子产品著称的德国 BOSCH 公司开发的,并最终成为国际标准(ISO11519以及ISO11898),是国际上应用最广泛的现场总线之一。差异点如下:
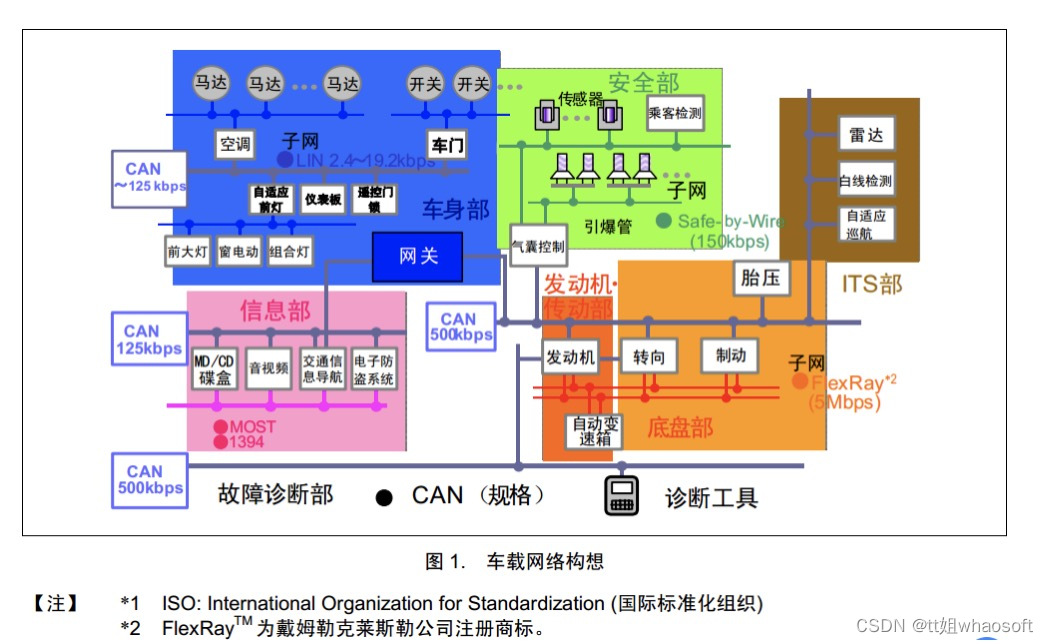
CAN 总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN 为底层协议专为大型货车和重工机械车辆设计的 J1939 协议。近年来,它具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强及振动大的工业环境。
我们来贴图一个车载网络构想图
1.2 CAN 物理层
与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有 CAN_High 和 CAN_Low 两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。我们来看一个示意图
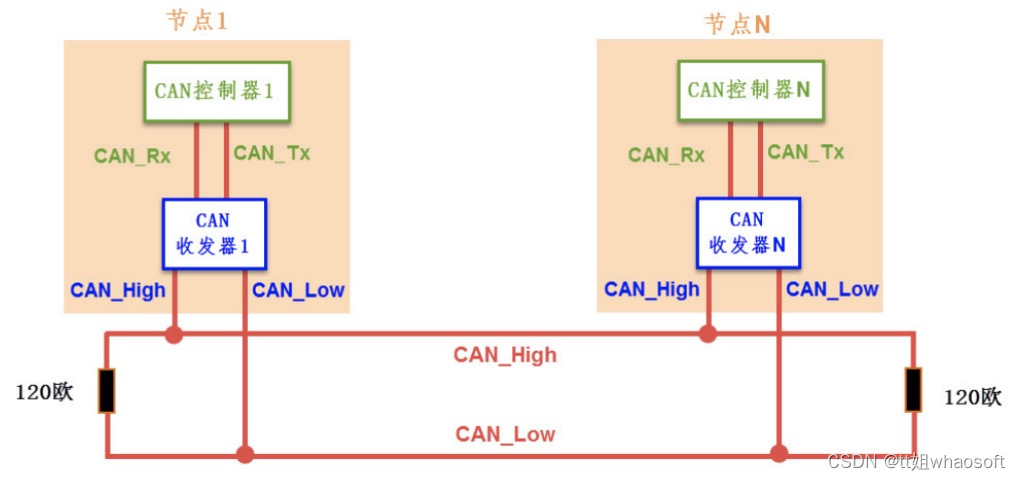
1.2.1 闭环总线网络
CAN 物理层的形式主要有两种,图中的 CAN 通讯网络是一种遵循 ISO11898 标准的高速、短距离“闭环网络”,它的总线最大长度为 40m,通信速度最高为 1Mbps,总线的两端各要求有一个“120 欧”的电阻。
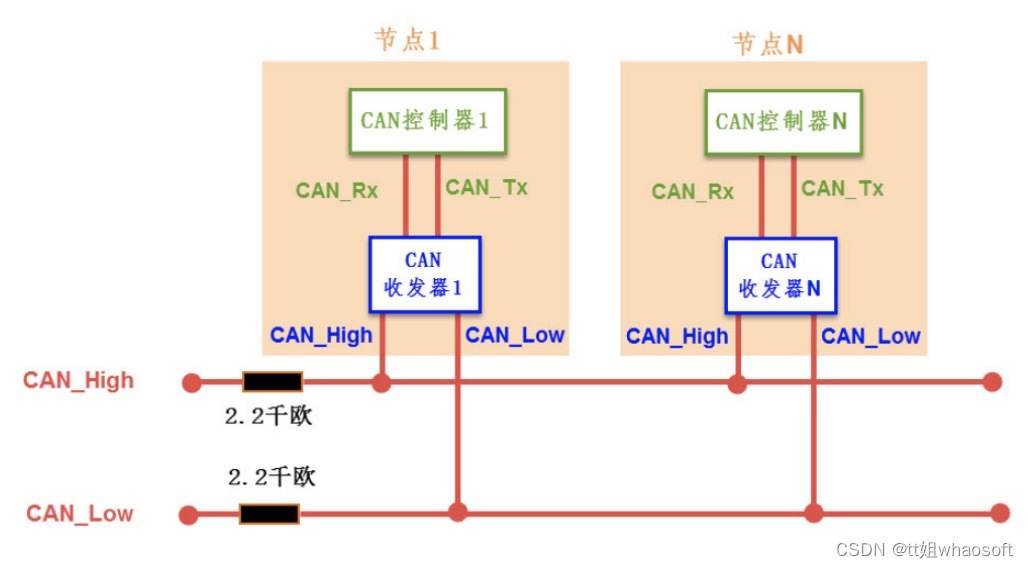
1.2.2 开环总线网络
图中的是遵循 ISO11519-2 标准的低速、远距离“开环网络”,它的最大传输距离为 1km,最高通讯速率为 125kbps,两根总线是独立的、不形成闭环,要求每根总线上各串联有一个“2.2千欧”的电阻。
1.2.3 通讯节点
从 CAN 通讯网络图可了解到,CAN 总线上可以挂载多个通讯节点,节点之间的信号经过总线传输,实现节点间通讯。由于 CAN 通讯协议不对节点进行地址编码,而是对数据内容进行编码的,所以网络中的节点个数理论上不受限制,只要总线的负载足够即可,可以通过中继器增强负载。
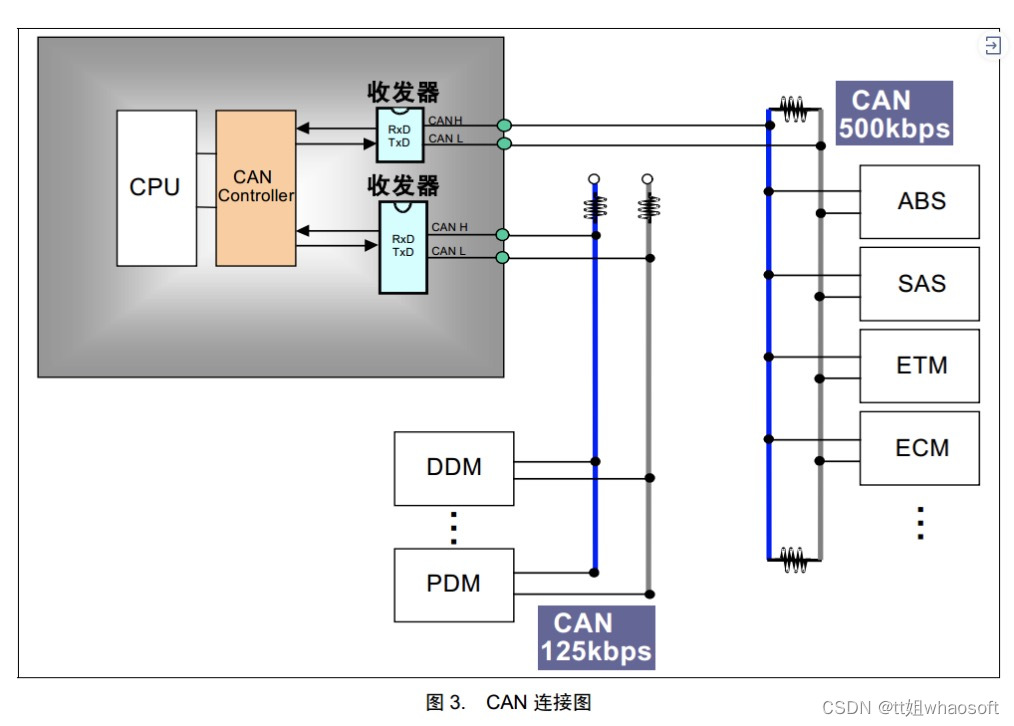
CAN 通讯节点由一个 CAN 控制器及 CAN 收发器组成,控制器与收发器之间通过 CAN_Tx 及CAN_Rx 信号线相连,收发器与 CAN 总线之间使用 CAN_High 及 CAN_Low 信号线相连。其中CAN_Tx 及 CAN_Rx 使用普通的类似 TTL 逻辑信号,而 CAN_High 及 CAN_Low 是一对差分信号线,使用比较特别的差分信号,下一小节再详细说明。
当 CAN 节点需要发送数据时,控制器把要发送的二进制编码通过 CAN_Tx 线发送到收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号,通过差分线 CAN_High 和 CAN_Low 线输出到 CAN 总线网络。而通过收发器接收总线上的数据到控制器时,则是相反的过程,收发器把总线上收到的 CAN_High 及 CAN_Low 信号转化成普通的逻辑电平信号,通过 CAN_Rx 输出到控制器中。
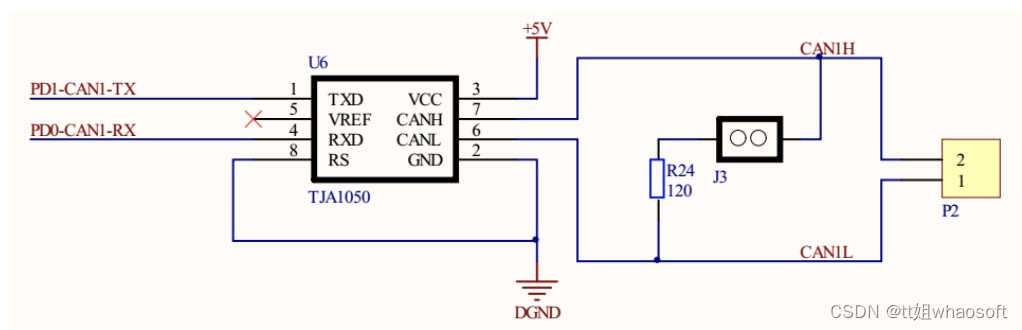
例如,STM32 的 CAN 片上外设就是通讯节点中的控制器,为了构成完整的节点,还要给它外接一个收发器,在我们实验板中使用型号为 TJA1050 的芯片作为 CAN 收发器。CAN 控制器与 CAN收发器的关系如同 TTL 串口与 MAX3232 电平转换芯片的关系, MAX3232 芯片把 TTL 电平的串口信号转换成 RS-232 电平的串口信号,CAN 收发器的作用则是把 CAN 控制器的 TTL 电平信号转换成差分信号 (或者相反) 。
目前有以下CAN电平转换芯片(不全)
我们来用TJA1050来看下原理图:
1.2.4 差分信号
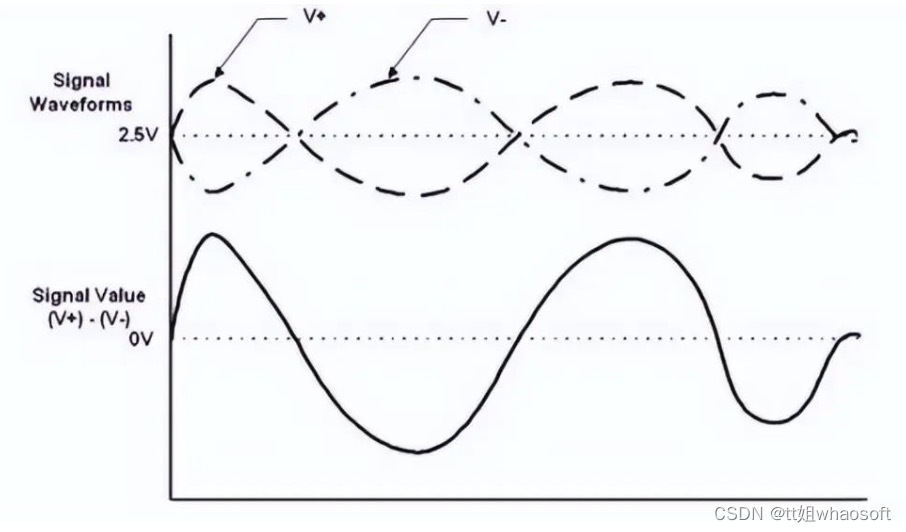
差分信号又称差模信号,与传统使用单根信号线电压表示逻辑的方式有区别,使用差分信号传输时,需要两根信号线,这两个信号线的振幅相等,相位相反,通过两根信号线的电压差值来表示
逻辑 0 和逻辑 1。见图,它使用了 V+ 与 V-信号的差值表达出了图下方的信号。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:
• 抗干扰能力强,当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
举一个例子,正常的单线假设逻辑1是3.3V,逻辑0假设是0V,但是如果有噪声,把3.3V弄成了0V(极端),把0V弄成了-3.3V,此时就逻辑错误,但是有Can高/Can低一般都作用于两根线,所以两个虽然都有噪声影响,但是差值还是不变的
• 能有效抑制它对外部的电磁干扰,同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
举一个例子,假设一根是10V,一根是-10V,单跟都会对外部造成电磁干扰,但是CAN可以把线拧在一起,跟编麻花一样,可以互相抵消电子干扰
• 时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。
由于差分信号线具有这些优点,所以在 USB 协议、485 协议、以太网协议及 CAN 协议的物理层中,都使用了差分信号传输。
1.2.5 CAN 协议中的差分信号
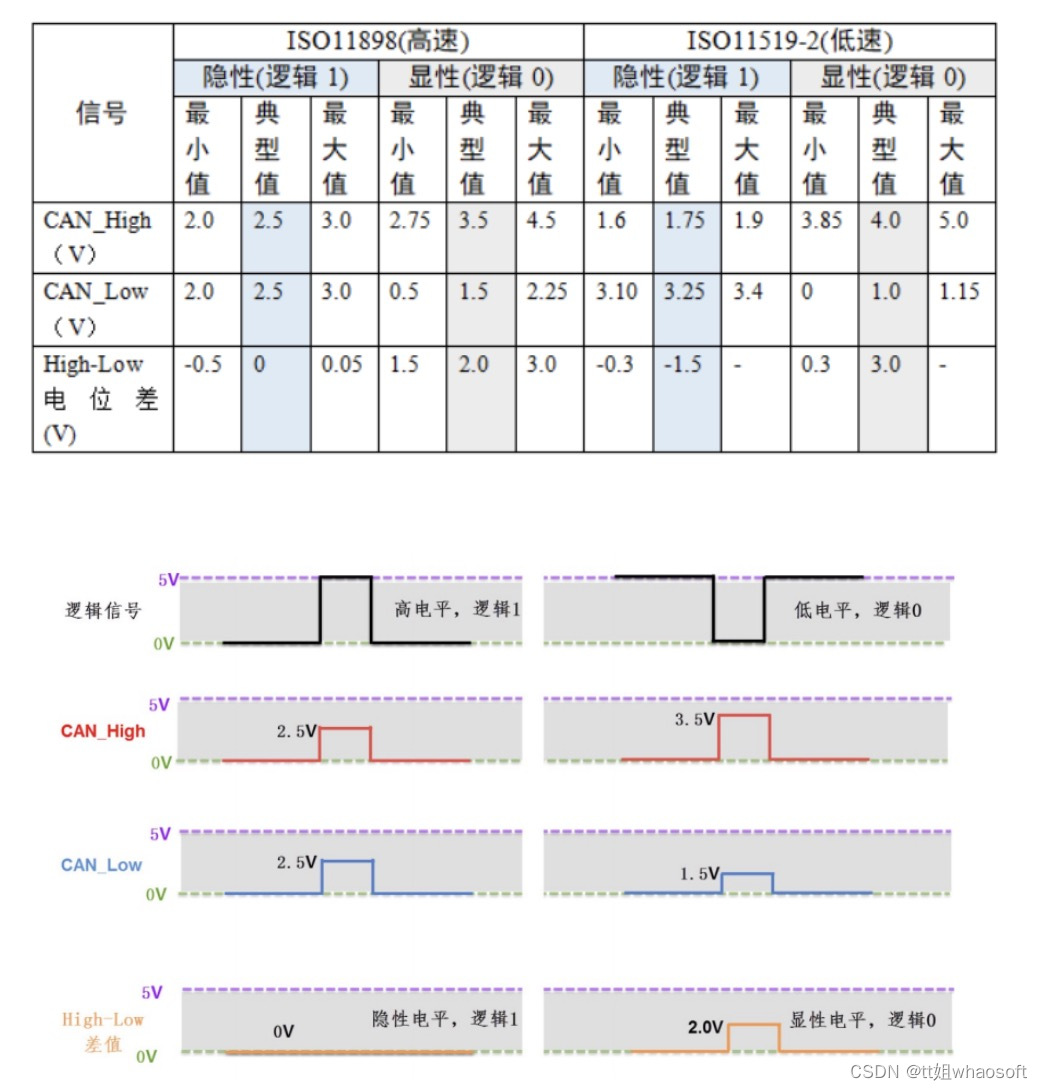
CAN 协议中对它使用的 CAN_High 及 CAN_Low 表示的差分信号做了规定,见表及图。以高速 CAN 协议为例,当表示逻辑 1 时 (隐性电平) ,CAN_High 和 CAN_Low 线上的电压均为 2.5v,即它们的电压差 VH-V:sub:L=0V;而表示逻辑 0 时 (显性电平) ,CAN_High 的电平为 3.5V,CAN_Low 线的电平为 1.5V,即它们的电压差为 VH-V:sub:L=2V。例如,当 CAN收发器从 CAN_Tx 线接收到来自 CAN 控制器的低电平信号时 (逻辑 0),它会使 CAN_High 输出3.5V,同时 CAN_Low 输出 1.5V,从而输出显性电平表示逻辑 0 。
在 CAN 总线中,必须使它处于隐性电平 (逻辑 1) 或显性电平 (逻辑 0) 中的其中一个状态。假如有两个 CAN 通讯节点,在同一时间,一个输出隐性电平,另一个输出显性电平,类似 I2C 总线的“线与”特性将使它处于显性电平状态,显性电平的名字就是这样来的,即可以认为显性具有优先的意味。
由于 CAN 总线协议的物理层只有 1 对差分线,在一个时刻只能表示一个信号,所以对通讯节点来说,CAN 通讯是半双工的,收发数据需要分时进行。在 CAN 的通讯网络中,因为共用总线,在整个网络中同一时刻只能有一个通讯节点发送信号,其余的节点在该时刻都只能接收。
1.3 CAN 协议层
1.3.1 CAN 的波特率及位同步
由于 CAN 属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯,特别地, CAN 还会使用“位同步”的方式来抗干扰、吸收误差,实现对总线电平信号进行正确的采样,确保通讯正常。
1.3.2 位时序分解
为了实现位同步,CAN 协议把每一个数据位的时序分解成如图 所示的 SS 段、PTS 段、PBS1 段、PBS2 段,这四段的长度加起来即为一个 CAN 数据位的长度。分解后最小的时间单位是 Tq,而一个完整的位由 8~25 个 Tq 组成。为方便表示,图 中的高低电平直接代表信号逻辑 0 或逻辑 1(不是差分信号)。
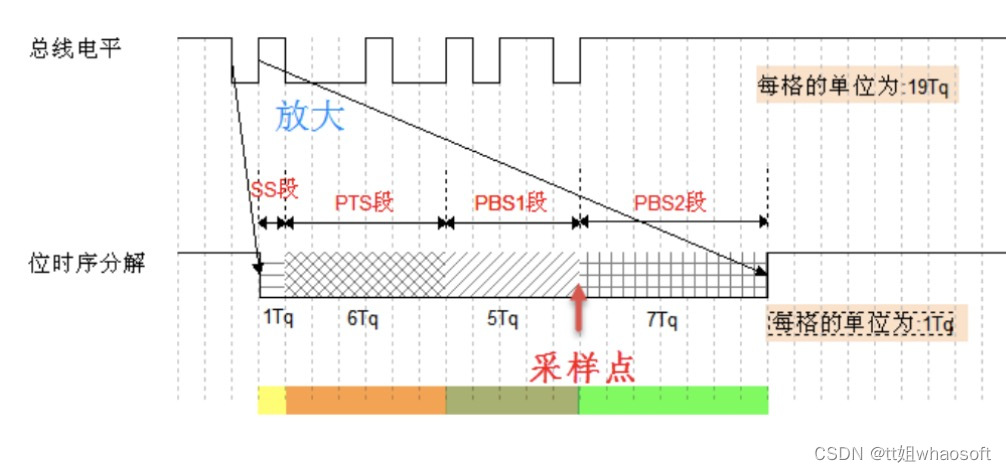
该图中表示的 CAN 通讯信号每一个数据位的长度为 19Tq,其中 SS 段占 1Tq, PTS 段占 6Tq, PBS1段占 5Tq, PBS2 段占 7Tq。信号的采样点位于 PBS1 段与 PBS2 段之间,通过控制各段的长度,可以对采样点的位置进行偏移,以便准确地采样。
各段的作用如介绍下:
• SS 段 (SYNC SEG)
SS 译为同步段,若通讯节点检测到总线上信号的跳变沿被包含在 SS 段的范围之内,则表示节点与总线的时序是同步的,当节点与总线同步时,采样点采集到的总线电平即可被确定为该位的电平。SS 段的大小固定为 1Tq。
• PTS 段 (PROP SEG)
PTS 译为传播时间段,这个时间段是用于补偿网络的物理延时时间。是总线上输入比较器延时和输出驱动器延时总和的两倍。PTS 段的大小可以为 1~8Tq。
• PBS1 段 (PHASE SEG1),
PBS1 译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。PBS1 段的初始大小可以为 1~8Tq。
• PBS2 段 (PHASE SEG2)
PBS2 这是另一个相位缓冲段,也是用来补偿边沿阶段误差的,它的时间长度在重新同步时可以缩短。PBS2 段的初始大小可以为 2~8Tq。
1.3.3 通讯的波特率
总线上的各个通讯节点只要约定好 1 个 Tq 的时间长度以及每一个数据位占据多少个 Tq,就可以确定 CAN 通讯的波特率。
例如,假设上图中的 1Tq=1us,而每个数据位由 19 个 Tq 组成,则传输一位数据需要时间 T1bit=19us,从而每秒可以传输的数据位个数为:1x10次方/19 = 52631.6 (bps)
这个每秒可传输的数据位的个数即为通讯中的波特率。
1.3.4 同步过程分析
波特率只是约定了每个数据位的长度,数据同步还涉及到相位的细节,这个时候就需要用到数据位内的 SS、PTS、PBS1 及 PBS2 段了。根据对段的应用方式差异, CAN 的数据同步分为硬同步和重新同步。其中硬同步只是当存在“帧起始信号”时起作用,无法确保后续一连串的位时序都是同步的,而重新同步方式可解决该问题,这两种方式具体介绍如下:
(1) 硬同步
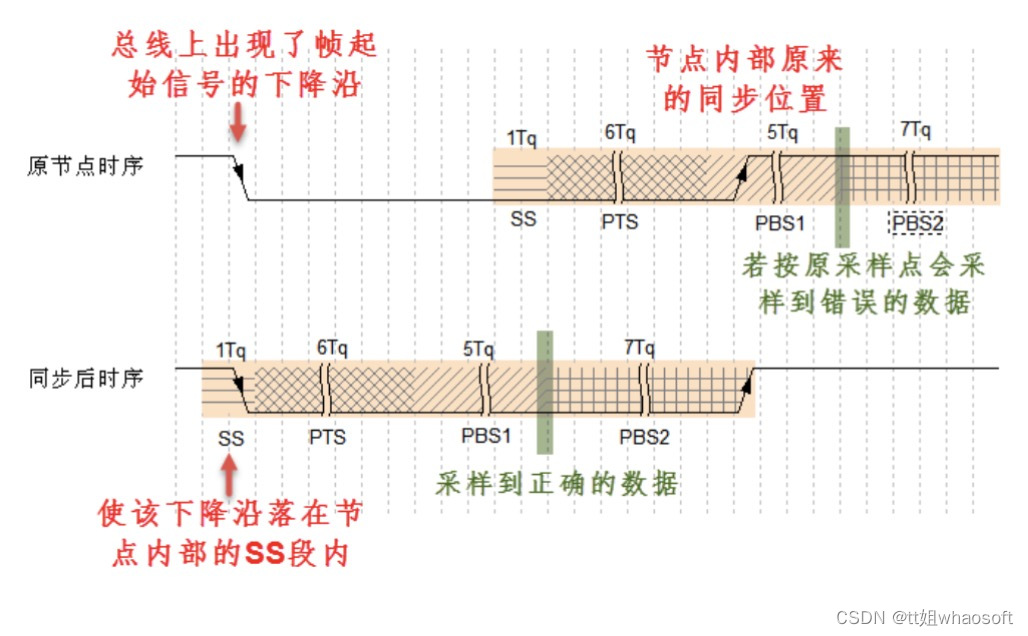
若某个 CAN 节点通过总线发送数据时,它会发送一个表示通讯起始的信号 (即下一小节介绍的帧起始信号),该信号是一个由高变低的下降沿。而挂载到 CAN 总线上的通讯节点在不发送数据时,会时刻检测总线上的信号。见图 ,可以看到当总线出现帧起始信号时,某节点检测到总线的帧起始信号不在节点内部时序的 SS 段范围,所以判断它自己的内部时序与总线不同步,因而这个状态的采样点采集得的数据是不正确的。所以节点以硬同步的方式调整,把自己的位时序中的 SS 段平移至总线出现下降沿的部分,获得同步,同步后采样点就可以采集得正确数据了。
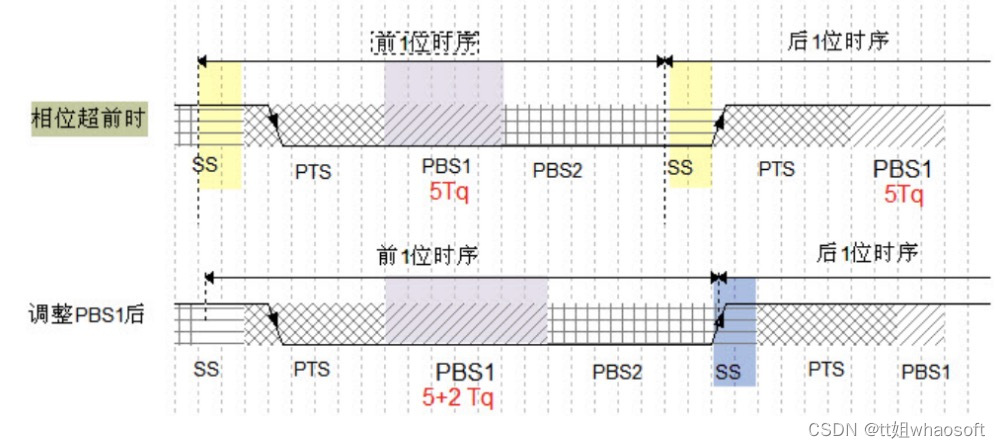
(2) 重新同步
前面的硬同步只是当存在帧起始信号时才起作用,如果在一帧很长的数据内,节点信号与总线信号相位有偏移时,这种同步方式就无能为力了。因而需要引入重新同步方式,它利用普通数据位的高至低电平的跳变沿来同步 (帧起始信号是特殊的跳变沿)。重新同步与硬同步方式相似的地方是它们都使用 SS 段来进行检测,同步的目的都是使节点内的 SS 段把跳变沿包含起来。重新同步的方式分为超前和滞后两种情况,以总线跳变沿与 SS 段的相对位置进行区分。第一种相位超前的情况如图 ,节点从总线的边沿跳变中,检测到它内部的时序比总线的时序相对超前 2Tq,这时控制器在下一个位时序中的 PBS1 段增加 2Tq 的时间长度,使得节点与总线时序重新同步。
第二种相位滞后的情况如图 ,节点从总线的边沿跳变中,检测到它的时序比总线的时序相对滞后 2Tq,这时控制器在前一个位时序中的 PBS2 段减少 2Tq 的时间长度,获得同步。
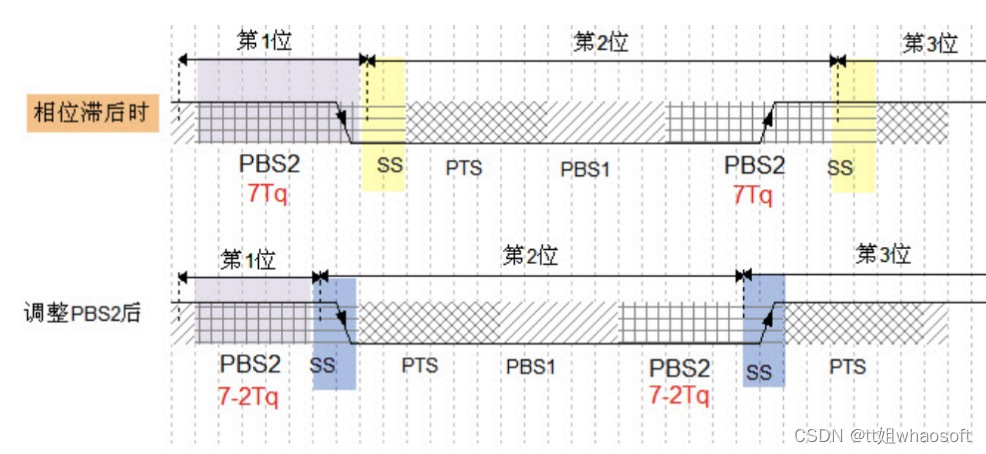
在重新同步的时候,PBS1 和 PBS2 中增加或减少的这段时间长度被定义为“重新同步补偿宽度SJW* (reSynchronization Jump Width)”。一般来说 CAN 控制器会限定 SJW 的最大值,如限定了最大 SJW=3Tq 时,单次同步调整的时候不能增加或减少超过 3Tq 的时间长度,若有需要,控制器会通过多次小幅度调整来实现同步。当控制器设置的 SJW 极限值较大时,可以吸收的误差加大,但通讯的速度会下降
1.3.5 CAN 的报文种类及结构
在 SPI 通讯中,片选、时钟信号、数据输入及数据输出这 4 个信号都有单独的信号线,I2C 协议包含有时钟信号及数据信号 2 条信号线,异步串口包含接收与发送 2 条信号线,这些协议包含的信号都比 CAN 协议要丰富,它们能轻易进行数据同步或区分数据传输方向。而 CAN 使用的是两条差分信号线,只能表达一个信号,简洁的物理层决定了 CAN 必然要配上一套更复杂的协议,如何用一个信号通道实现同样、甚至更强大的功能呢?CAN 协议给出的解决方案是对数据、操作命令 (如读/写) 以及同步信号进行打包,打包后的这些内容称为报文。
1.3.5.1 报文的种类
在原始数据段的前面加上传输起始标签、片选 (识别) 标签和控制标签,在数据的尾段加上 CRC校验标签、应答标签和传输结束标签,把这些内容按特定的格式打包好,就可以用一个通道表达各种信号了,各种各样的标签就如同 SPI 中各种通道上的信号,起到了协同传输的作用。当整个数据包被传输到其它设备时,只要这些设备按格式去解读,就能还原出原始数据,这样的报文就被称为 CAN 的“数据帧”。
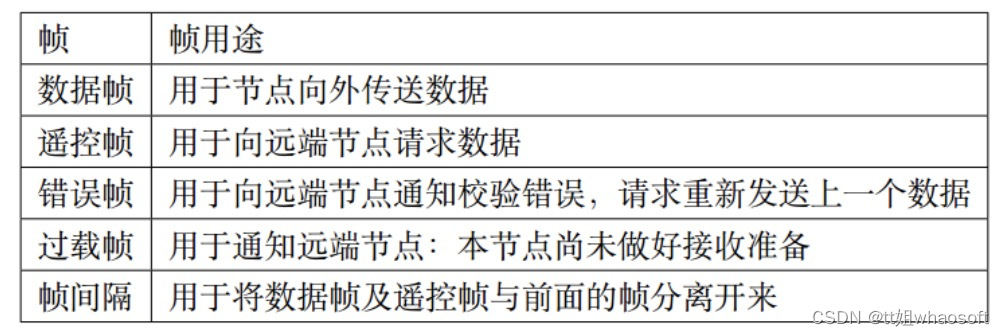
为了更有效地控制通讯,CAN 一共规定了 5 种类型的帧,它们的类型及用途说明如表
1.3.5.2 数据帧的结构
数据帧是在 CAN 通讯中最主要、最复杂的报文,我们来了解它的结构,见图
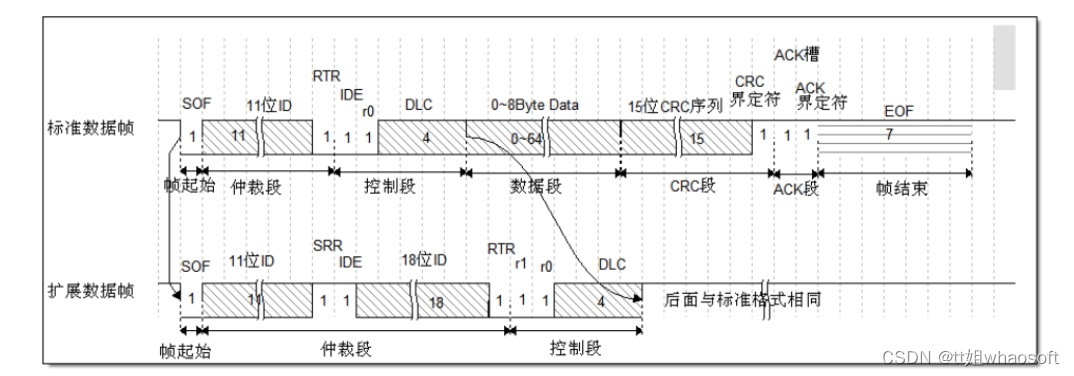
数据帧以一个显性位 (逻辑 0) 开始,以 7 个连续的隐性位 (逻辑 1) 结束,在它们之间,分别有仲裁段、控制段、数据段、CRC 段和 ACK 段。
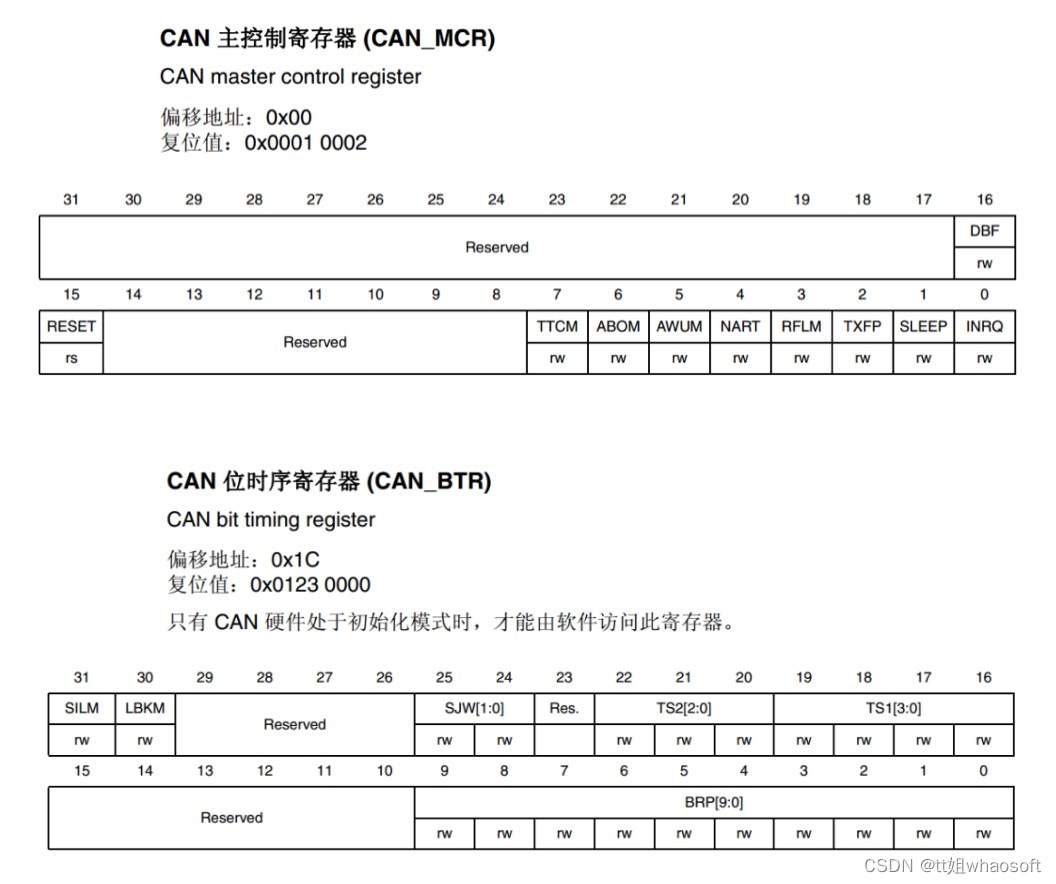
2.1 CAN 控制内核
框图中标号处的 CAN 控制内核包含了各种控制寄存器及状态寄存器,我们主要讲解其中的主控制寄存器 CAN_MCR 及位时序寄存器 CAN_BTR。
2.1.1 主控制寄存器 CAN_MCR
主控制寄存器 CAN_MCR 负责管理 CAN 的工作模式,它使用以下寄存器位实现控制。
2.1.2 位时序寄存器 (CAN_BTR) 及波特率
代码清单 CAN 初始化结构
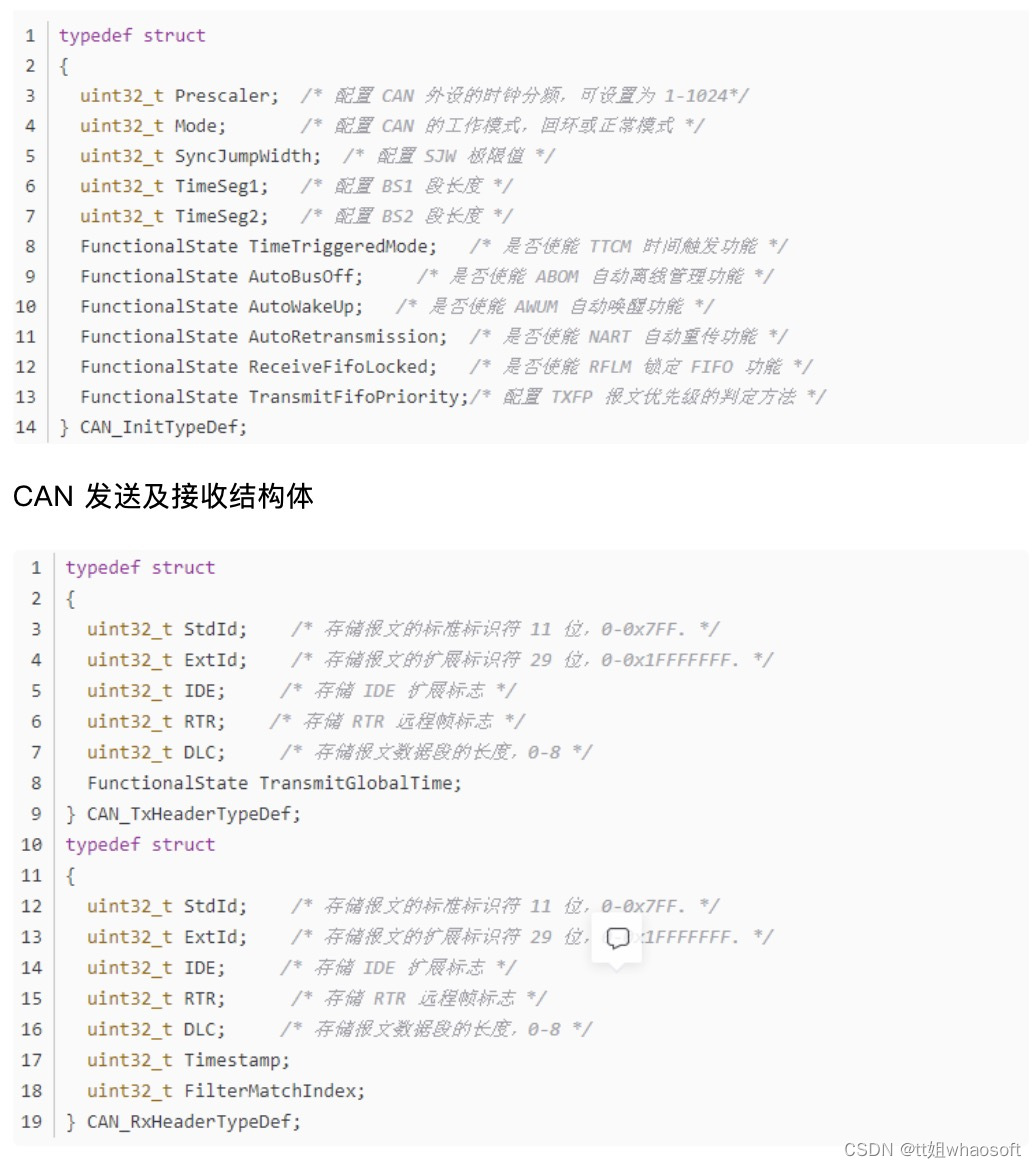
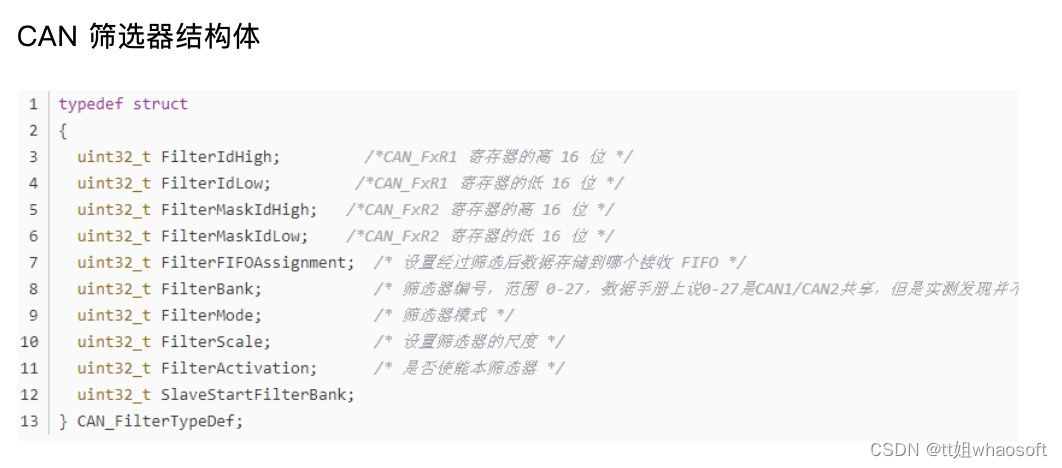
犯懒了 直接上图了
三、各种传感器原理
传感器(Sensor)是指将收集到的信息转换成设备能处理的信号的元件或装置。
人类会基于视觉、听觉、嗅觉、触觉获得的信息进行行动,设备也一样,根据传感器获得的信息进行控制或处理。
传感器收集转换的信号(物理量)有温度、光、颜色、气压、磁力、速度、加速度等。
这些利用了半导体的物质变化,除此之外,还有利用酶和微生物等生物物质的生物传感器。
不仅智能手机、个人电脑等通信设备,还包括医疗设备、可穿戴式设备、车载、自然环境、基础设施等,所有物体都能联网共享信息,从而创造更便利、更安心、更安全的社会。
而实现这些所不可缺少的是检测状态的“传感器”。
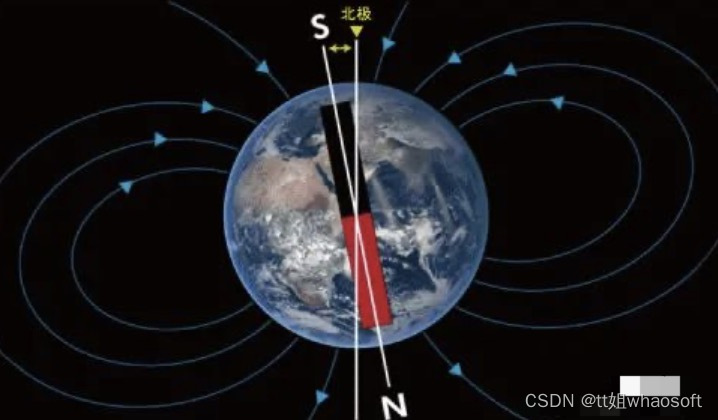
地磁传感器
地球被磁场磁力所包围,这被称为地磁。
地磁传感器是检测地球磁力的传感器,也被称为“电子罗盘”。
地磁传感器可以通过检测地磁来检测方向。
【围绕地球的地磁】
地磁传感器有X和Y两轴型以及添加了Z的三轴型,并测量各方向上的磁力值。
如果不考虑诸如简单罗盘之类的倾斜,则仅使用X轴和Y轴的值。当考虑倾斜时,需要将地磁传感器的3轴值与加速度传感器相结合,将其校正到正确的方向。
下图显示了地磁传感器水平旋转时X和Y值的分布。
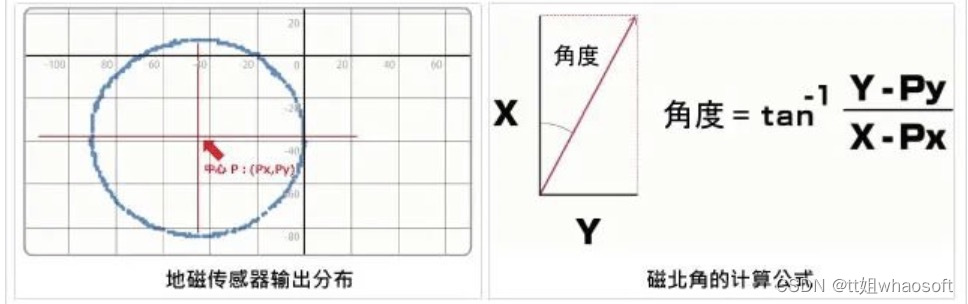
如果地磁传感器水平旋转,在不受周围磁场影响的理想情况下,输出分布图的圆心变为零。
然而,实际上中心因环境磁场的影响而移动,因此需要进行调整以将圆心移动到零。
地磁传感器导出的北极称为磁北(略偏离北极)。通过上述方程式计算该磁北的角度,可以容易知道方向。
各类磁传感器
磁传感器是一种旨在测量磁场的大小和方向的传感器。
根据目的不同有多种传感器,以下列举典型的传感器。
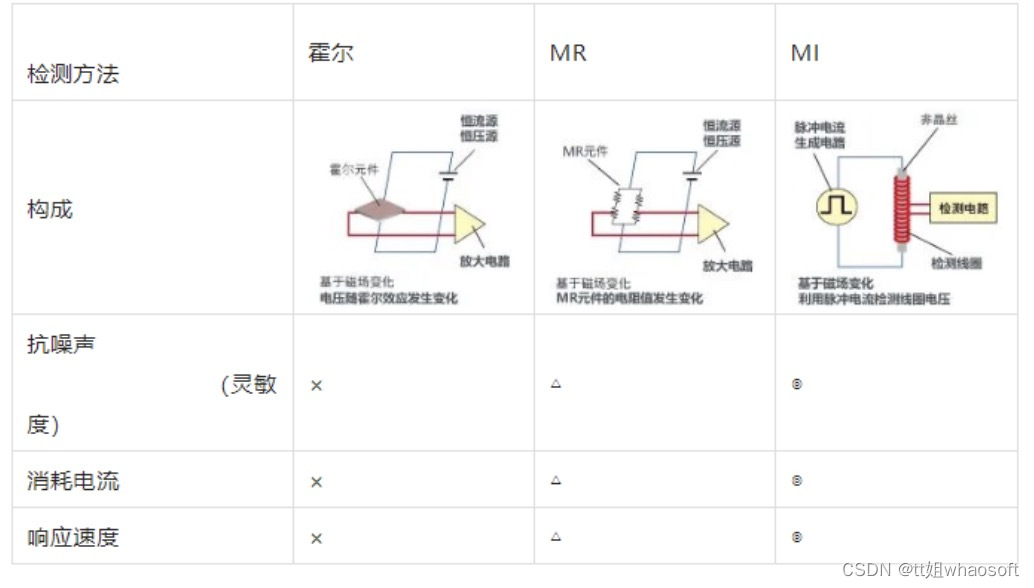
霍尔传感器
基于霍尔效应测量磁通密度的传感器,输出与磁通密度成比例的电压。
它易于使用,主要用于非接触式开关应用,例如门和笔记本电脑等物体的打开和关闭检测。
MR传感器
MR(Magneto Resistance)传感器也被称为磁阻效应传感器,利用物体电阻因磁场变化来测量地磁大小的传感器。
灵敏度高于霍尔传感器,功耗更低,因此是一种使用更广泛的磁传感器。除了电子罗盘等地磁检测应用外,它还用于电机旋转和位置检测应用。
MI传感器
MI(Magneto Impedance)传感器是下一代磁传感器,采用特殊的非晶丝并应用了磁阻抗效应。
它的灵敏度比霍尔传感器高出10,000倍以上,并且可以高精度地测量地磁的微小变化。
可以应用于超低消耗电流的方位检测(电子罗盘),还可应用于室内定位、金属异物检测等高灵敏度特性的应用。
脉搏传感器
脉搏波是心脏发送血液时产生的血管的体积变化波形,监测该体积变化的检测器称为脉搏传感器。
首先,测量心率有四种方法,心电图、光电脉波法、血压测量法、心音描记法等。
其中的光电脉波法是使用脉搏传感器进行测量的方法。
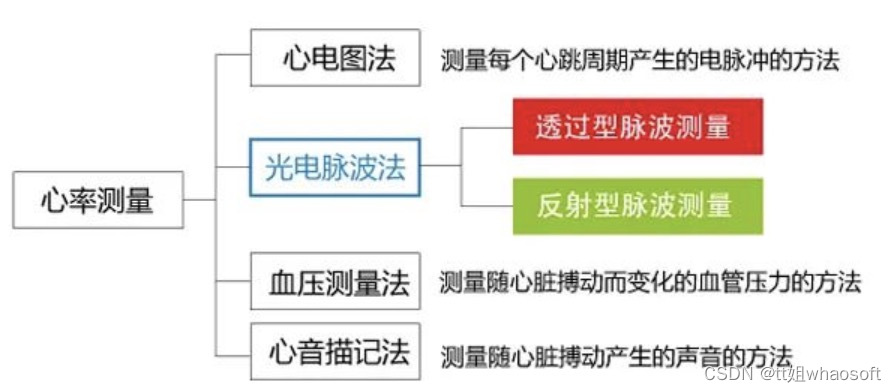
由于测量方法的不同,光电脉波法的脉搏传感器有透过型和反射型。
透过型通过向体表照射红外线或红光,测量随着心脏的脉动而变化的血流量的变化,作为透过身体的光的变化量来测量脉搏波。
该方法限于测量易于穿透的部分,例如指尖和耳垂。
反射型脉搏传感器
反射型脉搏传感器是向生物体照射红外线、红光、550nm左右波长的绿光,利用光电二极管或光电晶体管测量生物体反射的光。含氧血红蛋白存在于动脉血液中,具有吸收入射光的特性,因此通过检测随时间序列并随心脏搏动而变化的血流量(血管容积的变化),测量脉搏信号。
另外,由于是反射光的测量,因此不必像透过型那样限制测量部位。
[反射型脉搏传感器的原理]
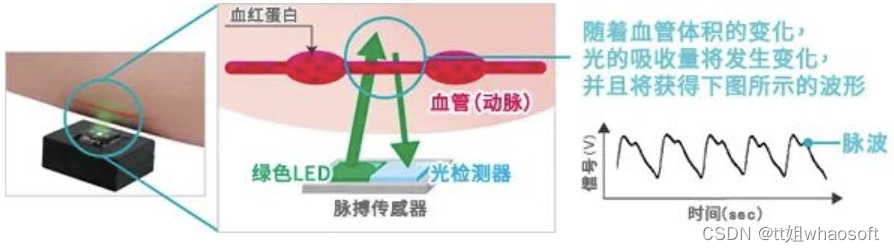
当使用红外线或红光测量脉搏波时,受到室外阳光中包含的红外线的影响,不能进行稳定的脉搏波测量。因此,建议仅将其用于室内或半室内应用。
在运动腕表等户外用途,血液中的血红蛋白的吸收率高,由于绿色光源较少受环境光的影响,我们将绿色LED作为照射光使用。
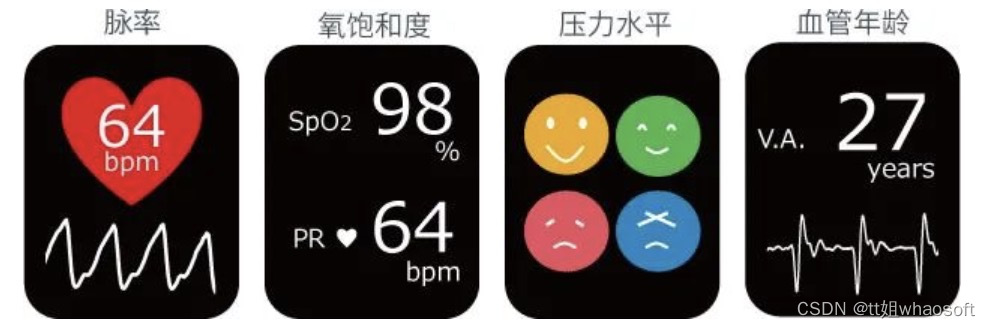
脉搏传感器的应用
通常,通过观察以下两点可以测量动脉血氧饱和度(SpO2)。通过脉搏传感器获得的波形的变动周期,观察心率(脉率);通过使用红外线和红光两个波长,来观察脉动(变化量)。
此外,作为脉搏传感器的应用,期望通过高速采样和高精度测量来获取诸如HRV分析(压力水平)、血管年龄等各种生命体征。
气压传感器
气压传感器是检测大气压力的传感器。
根据要测量的压力值,压力传感器具有如下所示的各种材料和方法的传感器。
在这些压力传感器中,检测大气压力(用于气压检测)的传感器通常被称为气压传感器。
[使用的材料 - 按方式分类的压力传感器]

气压传感器的典型示例是使用硅(Si)半导体的压阻式。
罗姆提供的气压传感器也是压阻式气压传感器。
压阻式气压传感器
压阻式气压传感器使用Si单晶板作为隔膜(压力接收元件),通过在其表面上扩散杂质形成电阻桥电路,将施加压力时产生的变形作为电阻值变化,来计算压力(气压)。
[压阻式气压传感器]
电阻率(电导率)因施加在该电阻上的压力而变化的现象称为压阻效应。罗姆的气压传感器IC将使用压阻式压力接收元件(隔膜结构和压阻集成在一起※MEMS),以及温度校正处理、控制电路等的集成电路(※ASIC)集成在一个封装里,可以轻松获得高精度的气压信息。
※ MEMS:Micro Electro Mechanical System(微机电系统)
在一个电路板上集成机械构成部件、传感器、执行机构(驱动部件)等的装置。
※ ASIC:Application Specific Integrated Circuit(专用集成电路)
它是一种集成电路,将多个电路功能组合成一个特定应用。
加速度传感器
加速度是指单位时间内产生的速度,测量加速度的IC就叫加速度传感器。
通过测量加速度,可以测得物体的倾斜、振动等信息。
加速度单位为m/s2(※国际单位制SI)。
另外,单位G是以※标准重力(1 G = 9.806 65m/s2)为基准的加速度值。
还有用于检测地震震动的加速度的单位※Gal(CGS单位制)。
※ 国际单位制SI(法语:Système international d'unités)
由长度m、重量kg、时间s (MKS单位)组合而成的国际单位。
※ 标准重力
物体在重力作用下产生的加速度。物体在自由落体时,物体每单位时间内增加的速度值(9.806 65m/s2)。
※ Gal
CGS(长度cm、重量g、时间s为基准)单位制的加速度单位。被定义为SI单位制的1/100(1Gal=0.01 m/s2 )。
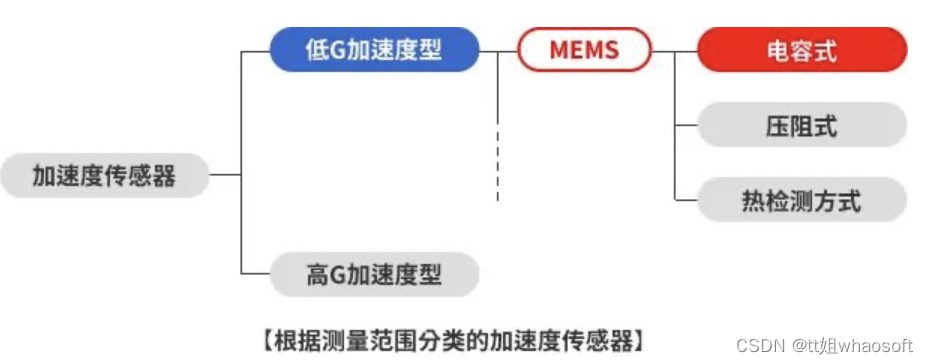
加速度传感器一般分为低G加速度传感器和高G加速度传感器,如下图所示。
电容式加速度传感器
罗姆集团加速度传感器是采用MEMS技术的电容式加速度传感器。
传感器元件由Si制成的固定电极、可动电极和弹簧构成。未施加加速度的状态下,固定电极和可动电极间的距离相同。施加加速度,则可动电极移位。由此与固定电极的位置关系发生变化,电极间容量发生变化。容量的变化通过※ASIC转化为电压,算出加速度。
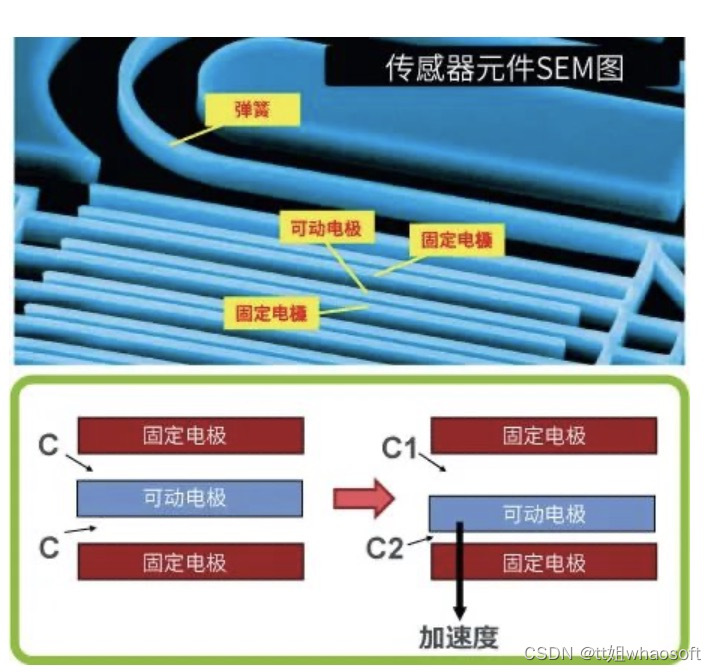
【电容式原理】
※ ASIC
Application Specific Integrated Circuit(专用集成电路)
指将特定用途的多个电路功能集成到一起的集成电路。
电流传感器
何谓电流传感器?
电流传感器是指检测电路中流动的电流值的传感器。
电流的检测方法
如下图所示,检测流动电流的方法大致可分为电阻检测型和磁场检测型。
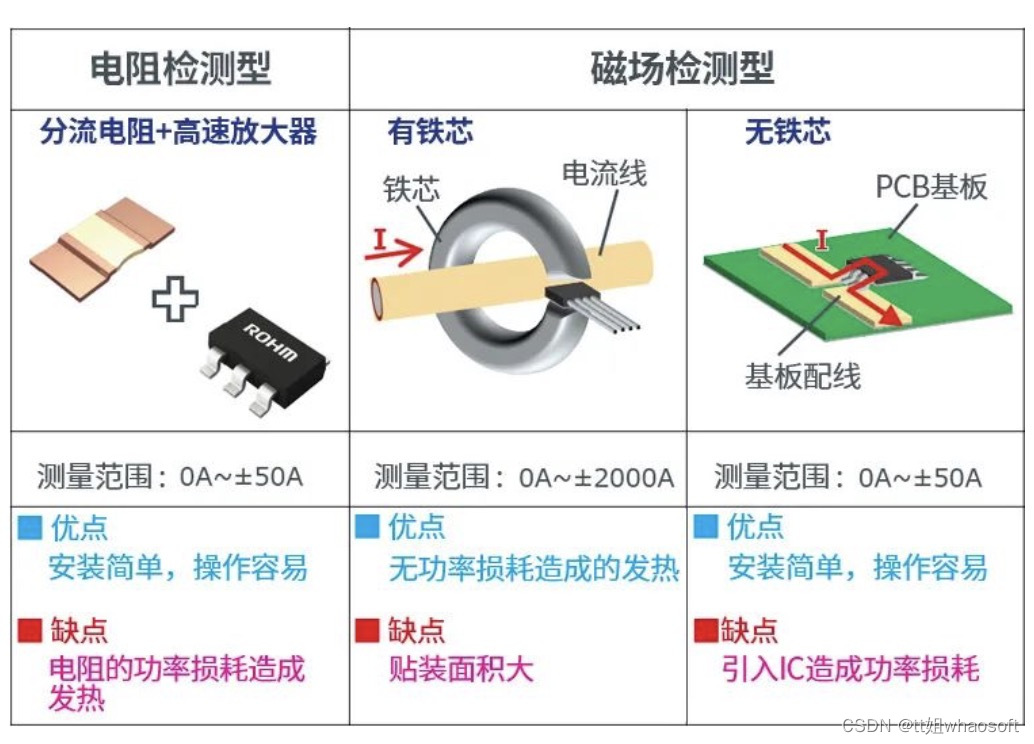
【电流检测方法和特点】
电阻检测型将分流电阻引发的电压降转换为电流。安装简单而且价廉物美,操作简单,但缺点是电阻上的功率损耗会产生较大的发热量。磁场检测型<有铁芯>
根据电流线中流动的电流测量铁芯中产生磁场的大小,以此来测量电流值。这种方法无需接触,功率损耗较小,但铁芯较大,存在贴装面积大的课题。<无铁芯>
利用霍尔效应将流动电流周围产生的磁场转换为电压(霍尔电压)进行测量,以此来测量电流值。因为霍尔效应产生的电压较小,所以IC由霍尔元件和放大电路构成。因为需要将电流引入IC内,所以会产生功率损耗。
M1电流传感器
为了消除上述磁场检测型在安装难度(有铁芯)和功率损耗(无铁芯)方面的缺点,ROHM开发出了使用MI(Magneto Impedance)元件的磁场检测型非接触型电流传感器。
MI传感器作为使用特殊非晶丝,利用其磁阻抗效应的新一代传感器,其特点是具备超高灵敏度的磁性检测能力。
灵敏度远超霍尔元件,可高精度检测磁性的微小变化。因此,无需将电流引入封装内,也能以高精度进行非接触式电流检测(磁性检测)。
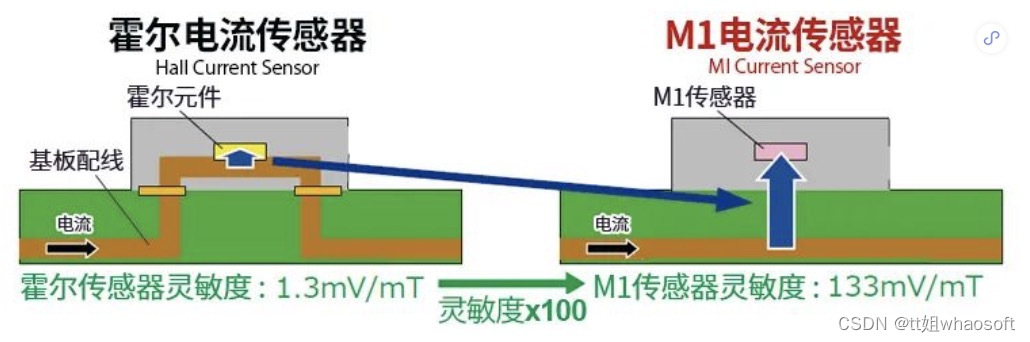
【电流传感器的结构比较(罗姆调查)】
综上所述,MI电流传感器可进行非接触式电流测量,功率损耗少,还能进一步缩小贴装面积。
颜色传感器
感光传感器(光传感器)中,检测R(红色)、G(绿色)、B(蓝色)3原色的叫作颜色传感器。
颜色传感器通过光电二极管接收周围光线,检测RGB值。
颜色传感器的原理
向物体照射具有RGB成分的光,反射光的颜色成分会随物体的颜色发生改变。
例如,红色物体的反射光成分为红,黄色物体为红和绿、白色则包含红、绿、蓝全部成分。
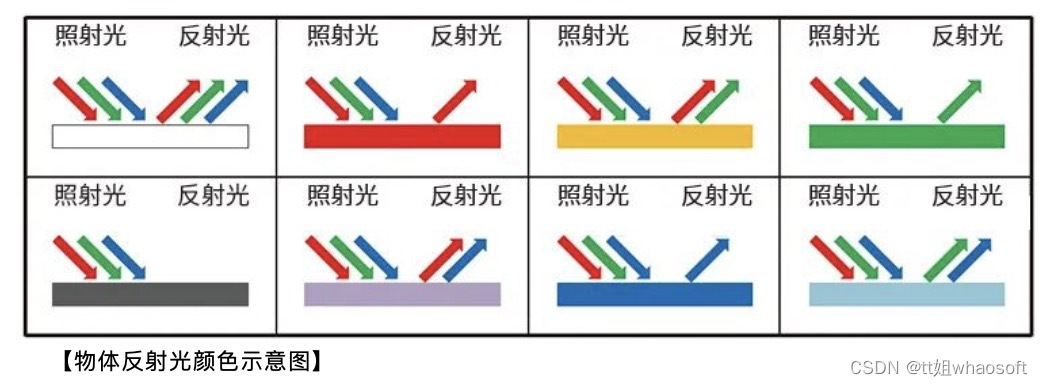
由此可知,物体的颜色由物体反射的光色(R、G、B)成分的比例决定。
人眼是通过获取反射光成分来识别物体的颜色。
在漆黑的场所什么都看不见吧!这是因为没有照射光,反射光自然也不存在,所以看上去是漆黑一片。
与人眼一样,颜色传感器是使用光电二极管接收光线,通过计算接收到的R、G、B量的比例来识别颜色。
颜色传感器IC的结构
下图是颜色传感器IC的结构。内部搭载了彩色滤光片(Color filter)和红外截止滤光片(Ir cut filter)。
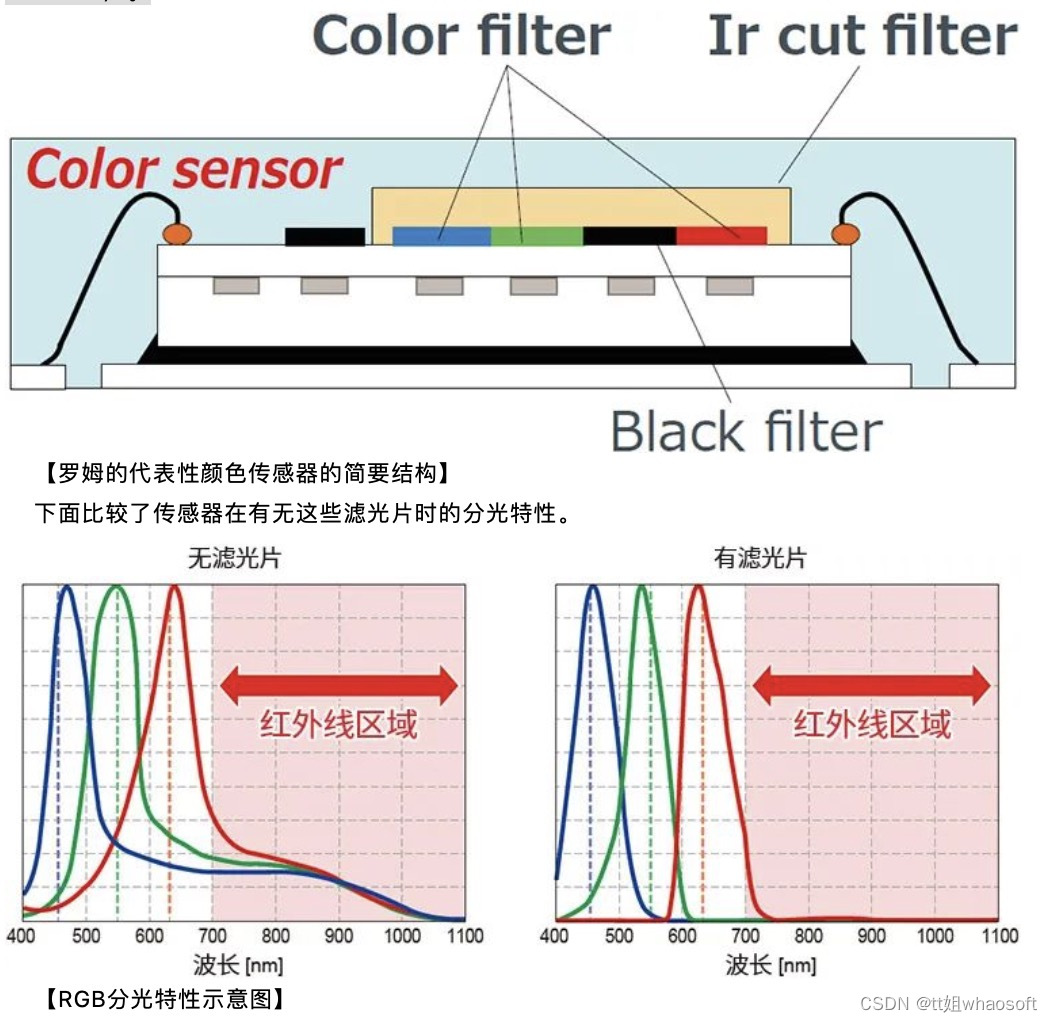
【RGB分光特性示意图】
颜色传感器IC通过为内部传感器配备R、G、B各种颜色的滤光片,具备了较高的RGB分光特性,而且通过配备红外截止滤光片,具备了红外线去除特性,能高精度识别颜色。
四、霍尔效应传感器工作原理
什么是霍尔效应?
霍尔效应是由带电粒子(如电子)相应电场和磁场的相互作用引起的。更为形象生动的大家可以看下面这个霍尔效应原理动画图。
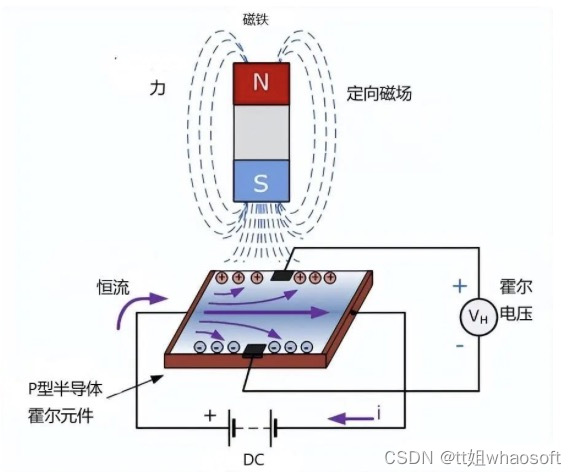
霍尔效应原理
当导电板连接到带有电池的电路时,电流开始流动。电荷载体将沿着从板的一端到另一端的线性路径。电荷载流子的运动导致磁场的产生。当磁体靠近板放置时,电荷载流子的磁场会发生畸变。这扰乱了电荷载流子的直线流动。扰乱电荷载流子流动方向的力称为洛伦兹力。
由于电荷载流子磁场的畸变,带负电的电子将偏转到板的一侧,而带正电的空穴将偏转到板的另一侧。在板的两侧之间会产生一个电位差,称为霍尔电压,可以用仪表测量。
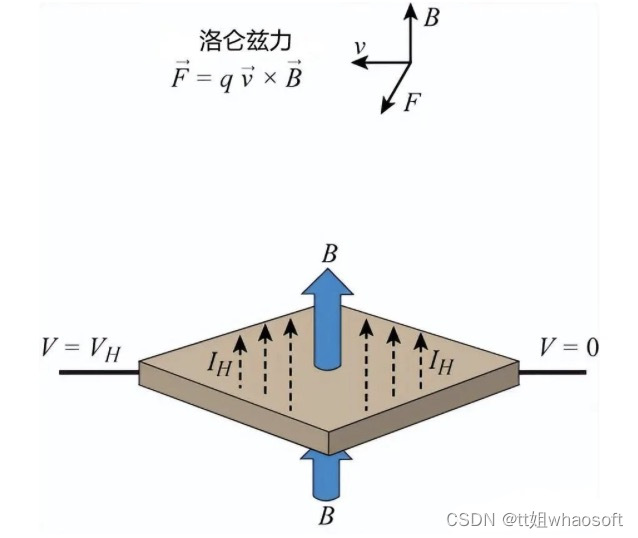
霍尔效应和洛伦兹力,蓝色箭头 B 表示垂直穿过导电板的磁场
霍尔效应原理表明:当将载流导体或半导体引入垂直磁场时,可以在电流路径成直角的位置测量电压。
霍尔电压表示为 VH 由公式给出:
霍尔电压公式
VH 是导电板上的霍尔电压
I 是流过传感器的电流
B 是磁场强度
q 是电荷
n 是每单位体积的电荷载流子的数量
d 是传感器的厚度
霍尔效应传感器原理
当传感器周围的磁通密度超过某个预设阈值时,传感器会检测到它并产生称为霍尔电压 VH 的输出电压。具体的原理如下图所示。
霍尔效应传感器基本上由一块薄薄的矩形 p 型半导体材料组成,例如砷化镓 (GaAs)、锑化铟 (InSb) 或砷化铟 (InAs),其自身通过连续电流。
霍尔效应传感器原理图
当霍尔效应传感器放置在磁场中时,磁通量线对半导体材料施加一个力,使载流子、电子和空穴偏转到半导体板的任一侧。电荷载流子的这种运动是它们穿过半导体材料时所经历的磁力的结果。
当这些电子和空穴向侧面移动时,由于这些电荷载流子的积累,在半导体材料的两侧之间会产生电位差。然后,电子通过半导体材料的运动受到与其成直角的外部磁场的影响,这种影响在扁平矩形材料中更大。
霍尔效应提供有关磁极类型和磁场大小的信息。例如,南极会使设备产生电压输出,而北极则不会产生任何影响。通常,霍尔效应传感器和开关设计为在不存在磁场时处于“关闭”状态(开路状态)。它们只有在受到足够强度和极性的磁场时才会“打开”(闭路条件)。
霍尔效应传感器
在最简单的形式中,传感器作为模拟传感器工作,直接返回电压。在已知磁场的情况下,可以确定其与霍尔板的距离。使用传感器组,可以推断出磁体的相对位置。
通常,霍尔效应传感器与允许设备以数字(开/关)模式运行的电路相结合,并且在此配置中可能被称为开关。下图为包含两个磁铁的轮子经过霍尔效应传感器,可以明显的看到灯的变化。
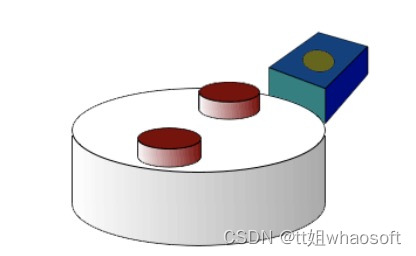
包含两个磁铁的轮子经过霍尔效应传感器
霍尔效应传感器
大多数霍尔效应器件不能直接切换大型电气负载,因为它们的输出驱动能力非常小,大约为 10 到 20mA。对于大电流负载,在输出中添加一个集电极开路(电流吸收)NPN 晶体管。如下图所示:
该晶体管在其饱和区域中作为 NPN 灌电流开关工作,只要施加的磁通密度高于“ON”预设点的磁通密度,就会将输出端子短接到地。
输出开关晶体管可以是发射极开路晶体管、集电极开路晶体管配置或两者都提供推挽输出类型配置,该配置可以吸收足够的电流以直接驱动许多负载,包括继电器、电机、LED 和灯。
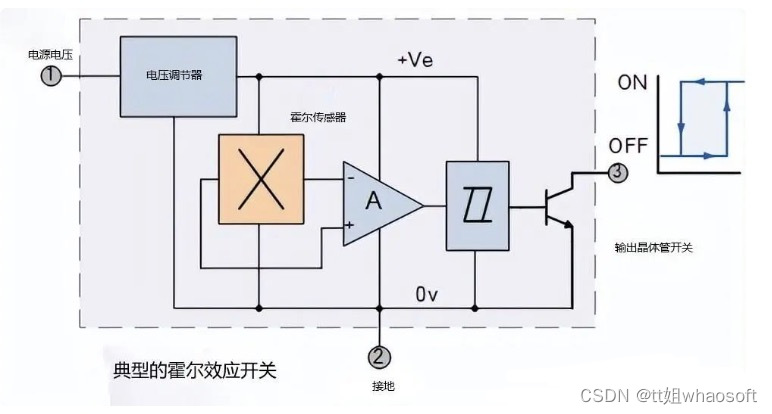
典型的霍尔效应开关图
霍尔效应传感器可提供线性或数字输出。线性(模拟)传感器的输出信号直接取自运算放大器的输出,输出电压与通过霍尔传感器的磁场成正比。该输出霍尔电压为:
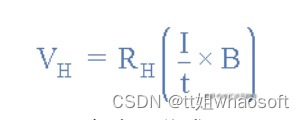
霍尔电压公式图
V H是以伏特为单位的霍尔电压
R H是霍尔效应系数
I是流过传感器的电流,单位为安培
t是传感器的厚度,单位为 mm
B是特斯拉的磁通量密度
线性或模拟传感器提供连续的电压输出,该输出随强磁场增加而随着弱磁场减少。在线性输出霍尔效应传感器中,随着磁场强度的增加,来自放大器的输出信号也会增加,直到它开始因施加电源的限制而饱和。
磁场的任何额外增加都不会对输出产生影响,但会使其更加饱和。
霍尔传感器测量方法--磁场的运动路径
霍尔效应传感器由磁场激活,在许多应用中,该设备可以通过连接到移动轴或设备的单个永磁体来操作。有许多不同类型的磁铁运动,例如“正面”、“侧身”、“推拉”或“推-推”等感应运动。
使用每种类型的配置,以确保最大灵敏度,磁通线必须始终垂直于设备的感应区域,并且必须具有正确的极性。
此外,为了确保线性,需要高场强磁铁,以便为所需的运动产生较大的场强变化。检测磁场有多种可能的运动路径,以下是使用单个磁体的两种更常见的传感配置:正面检测和侧向检测。
1、霍尔传感器测量方法--正面检测
顾名思义,“正面检测”要求磁场垂直于霍尔效应传感设备,并且为了检测,它直接朝向有源面接近传感器。一种“正面”的方法。
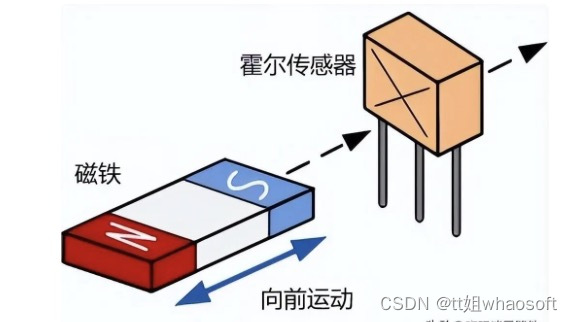
这种正面方法会产生一个输出信号VH,它在线性器件中表示磁场强度,即磁通量密度,它是距霍尔效应传感器的距离的函数。距离越近,磁场越强,输出电压越大,反之亦然。
线性器件还可以区分正磁场和负磁场。非线性装置可以在远离磁铁的预设气隙距离处触发输出“ON”,以指示位置检测。
2、霍尔传感器测量方法--侧身检测
第二种传感配置是“横向检测”。这需要在霍尔效应元件的表面上横向移动磁铁。
当磁场在固定气隙距离内穿过霍尔元件的表面时,侧向或滑过检测对于检测磁场的存在很有用,例如,计算旋转磁铁或电机的旋转速度。
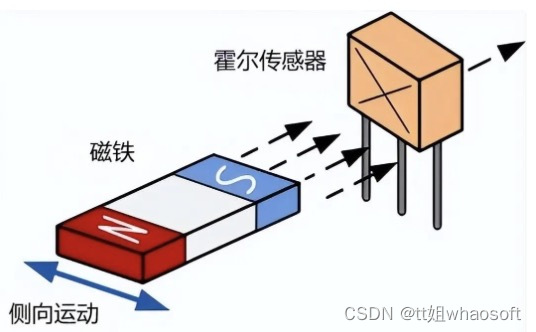
根据磁场通过传感器零场中心线时的位置,可以产生表示正输出和负输出的线性输出电压。这允许定向运动检测,它可以是垂直的也可以是水平的。
霍尔传感器--位置检测器
根据设备的类型(无论是数字的还是线性的),有许多不同的方法可以将霍尔效应传感器连接到电气和电子电路。一个非常简单且易于构建的实例如下图:
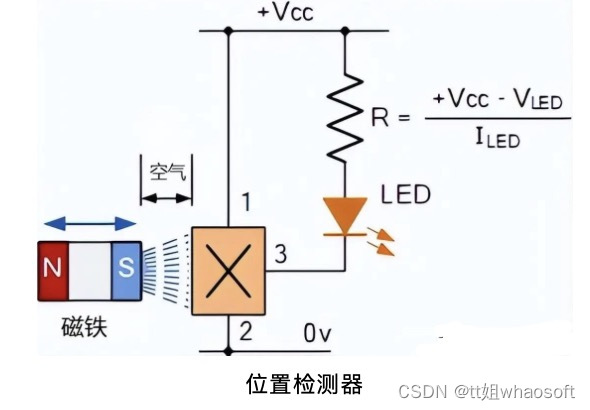
当不存在磁场(0 )时,正面位置检测器将“关闭”。当永磁体南极(正高斯)垂直移动到霍尔效应传感器的有效区域时,设备将“打开”并点亮 LED。一旦切换“ON”,霍尔效应传感器将保持“ON”。
霍尔传感器优缺点
优点
霍尔效应传感器可以用作电子开关。
这种开关的成本低于机械开关,而且更可靠。
它的工作频率最高可达 100 kHz。
它不会受到触点反弹的影响,因为使用了具有滞后功能的固态开关而不是机械触点。
由于传感器采用密封包装,因此不会受到环境污染物的影响。因此,它可以在恶劣的条件下使用。
对于线性传感器(用于磁场强度测量),霍尔效应传感器:
可以测量范围广泛的磁场
可以测量北极或南极磁场
可以是平的
缺点
霍尔效应传感器提供的测量精度远低于磁通门磁力计或基于磁阻的传感器。此外,霍尔效应传感器漂移显着,需要补偿。
五、单端、推挽、桥式拓扑结构变压器对比
单端正激式
单端:通过一只开关器件单向驱动脉冲变压器。
正激:脉冲变压器的原/付边相位关系,确保在开关管导通,驱动脉冲变压器原边时,变压器付边同时对负载供电。
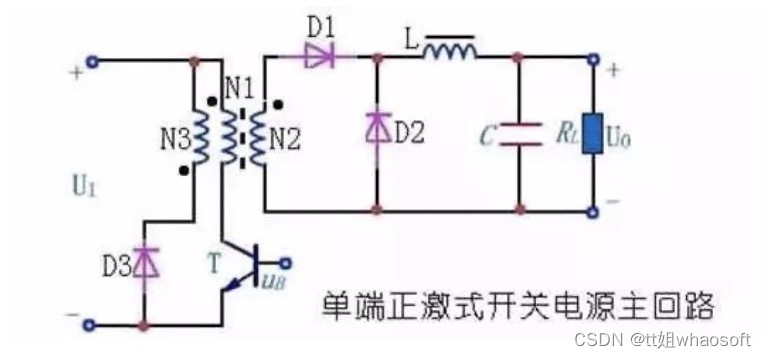
该电路的最大问题是:开关管T交替工作于通/断两种状态,当开关管关断时,脉冲变压器处于“空载”状态,其中储存的磁能将被积累到下一个周期,直至电感器饱和,使开关器件烧毁。图中的D3与N3构成的磁通复位电路,提供了泄放多余磁能的渠道。
单端反激式
反激式电路与正激式电路相反,脉冲变压器的原/付边相位关系,确保当开关管导通,驱动脉冲变压器原边时,变压器付边不对负载供电,即原/付边交错通断。
脉冲变压器磁能被积累的问题容易解决,但是,由于变压器存在漏感,将在原边形成电压尖峰,可能击穿开关器件,需要设置电压钳位电路予以保护D3、N3构成的回路。
从电路原理图上看,反激式与正激式很相象,表面上只是变压器同名端的区别,但电路的工作方式不同,D3、N3的作用也不同。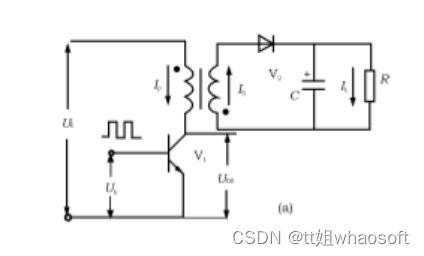
推挽(变压器中心抽头)式
这种电路结构的特点是:对称性结构,脉冲变压器原边是两个对称线圈,两只开关管接成对称关系,轮流通断,工作过程类似于线性放大电路中的乙类推挽功率放大器。
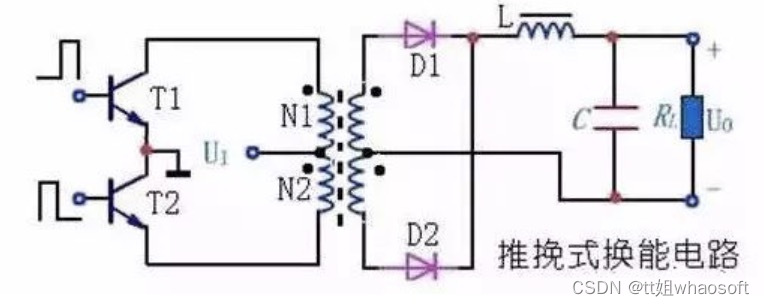
主要优点:高频变压器磁芯利用率高(与单端电路相比)、电源电压利用率高(与后面要叙述的半桥电路相比)、输出功率大、两管基极均为低电平,驱动电路简单。
主要缺点:变压器绕组利用率低、对开关管的耐压要求比较高(至少是电源电压的两倍)。
全桥式
这种电路结构的特点是:由四只相同的开关管接成电桥结构驱动脉冲变压器原边。
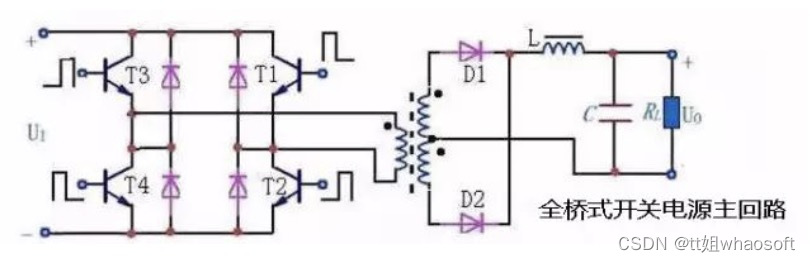
图中T1、T4为一对,由同一组信号驱动,同时导通/关端;T2、T3为另一对,由另一组信号驱动,同时导通/关端。两对开关管轮流通/断,在变压器原边线圈中形成正/负交变的脉冲电流。
主要优点:与推挽结构相比,原边绕组减少了一半,开关管耐压降低一半。
主要缺点:使用的开关管数量多,且要求参数一致性好,驱动电路复杂,实现同步比较困难。这种电路结构通常使用在1KW以上超大功率开关电源电路中。
半桥式
电路的结构类似于全桥式,只是把其中的两只开关管(T3、T4)换成了两只等值大电容C1、C2。
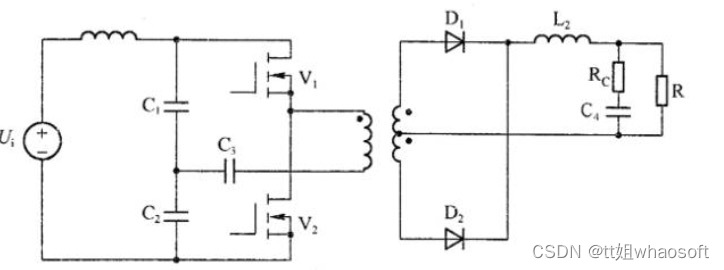
主要优点:
具有一定的抗不平衡能力,对电路对称性要求不很严格
适应的功率范围较大,从几十瓦到千瓦都可以
开关管耐压要求较低
电路成本比全桥电路低
这种电路常常被用于各种非稳压输出的DC变换器,如电子荧光灯驱动电路中。