
在发那科工业机器人得到充分和正确标定零点时,它的使用效果才会最好。 因为只有这样,机器人才能达到它最高的点精度和轨迹精度,完全能够以编程设定的动作运动,所以这篇文章介绍一下发那科工业机器人如何进行零点标定。
如果因电池长时间电量低出现的零位丢失,更换电池后首先需要做以下步骤↓
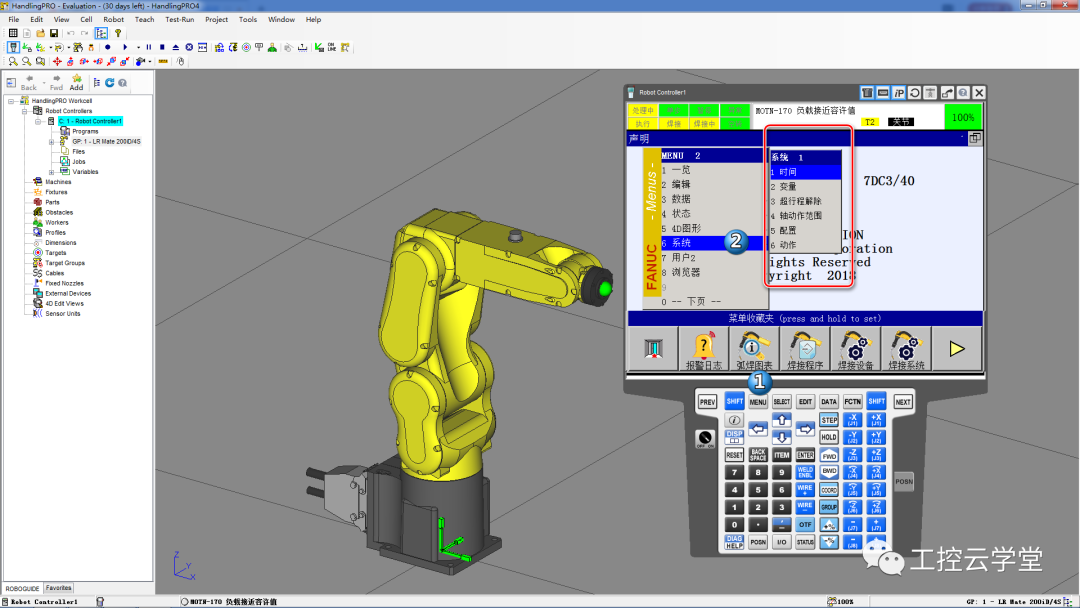
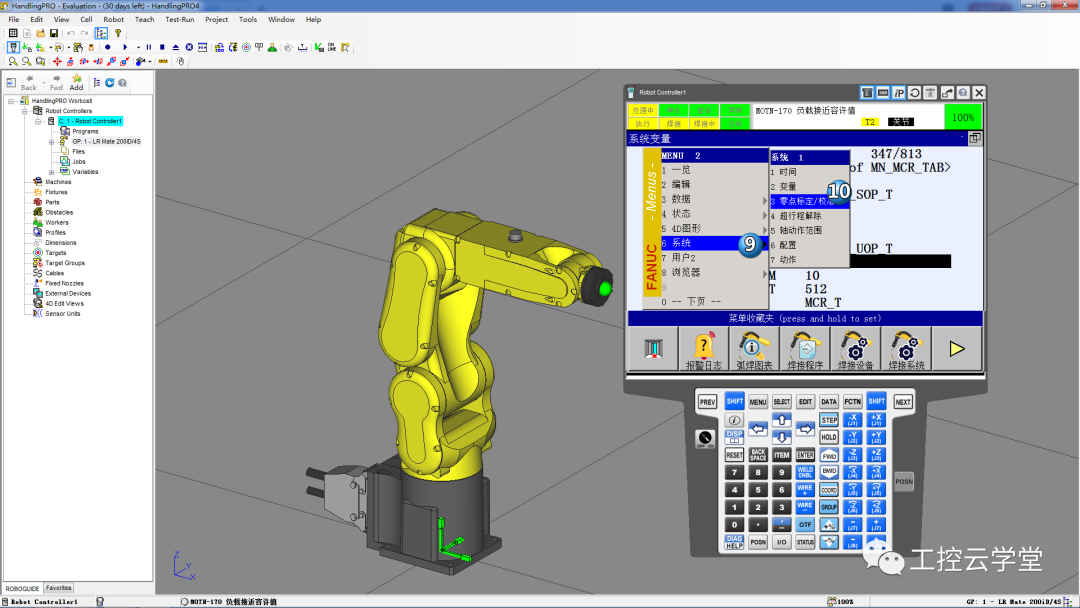
一、按下示教器中的MENU键,选择下一页,然后选择系统,发现没有零点标定的选项,这时其他的一切无从谈起,我们必须把这个选项调出来。
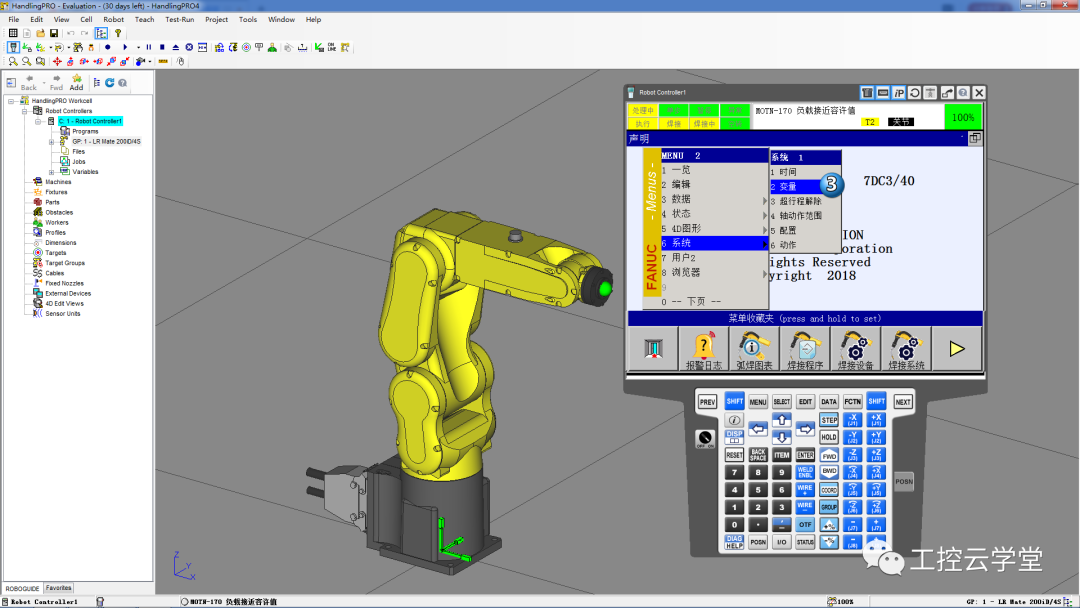
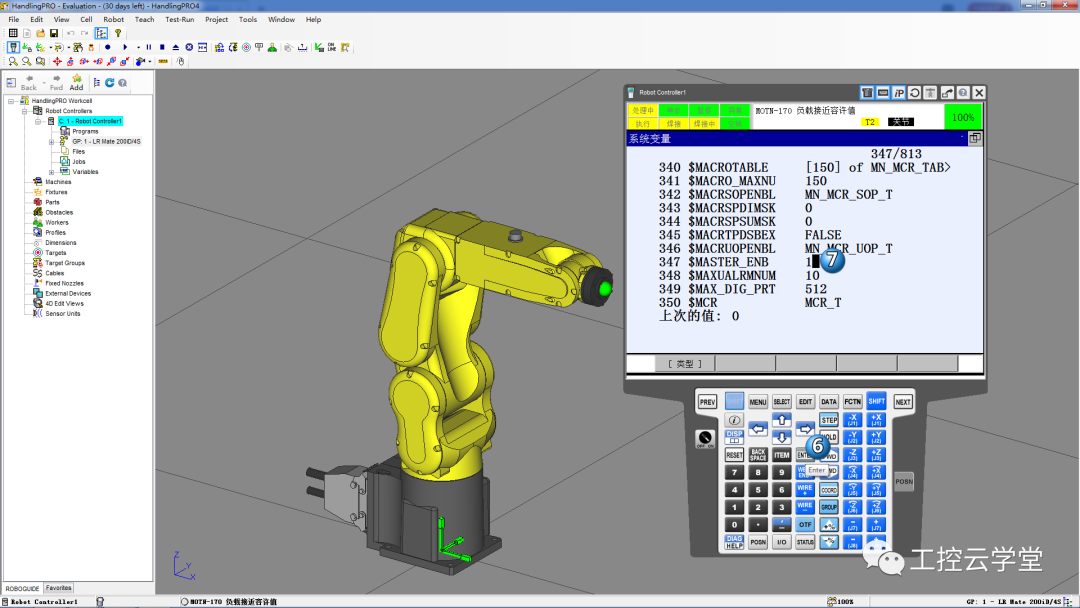
于是我们进入系统下面的变量。
按下“Shift”键+下方向键快速下翻找到“MASET_ENB”这一项。
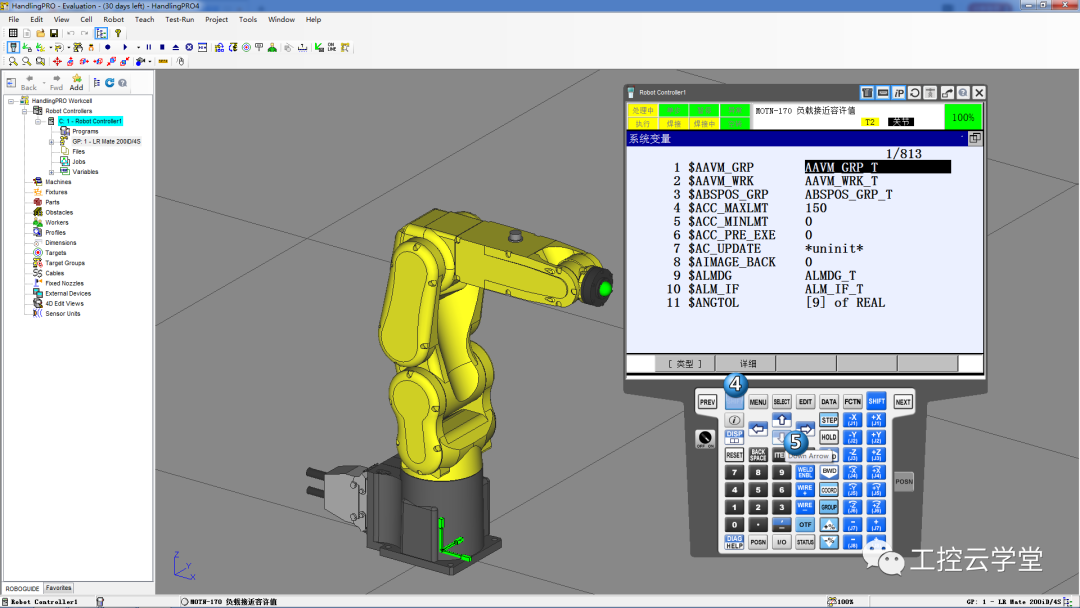
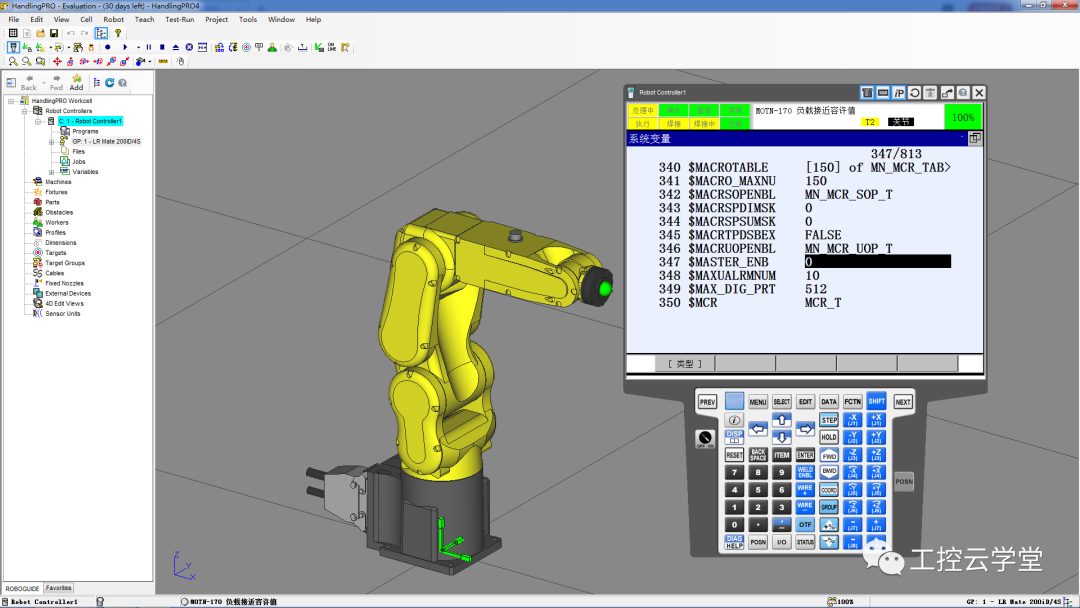
将其修改成1,默认为0,即不显示零点标定选项。
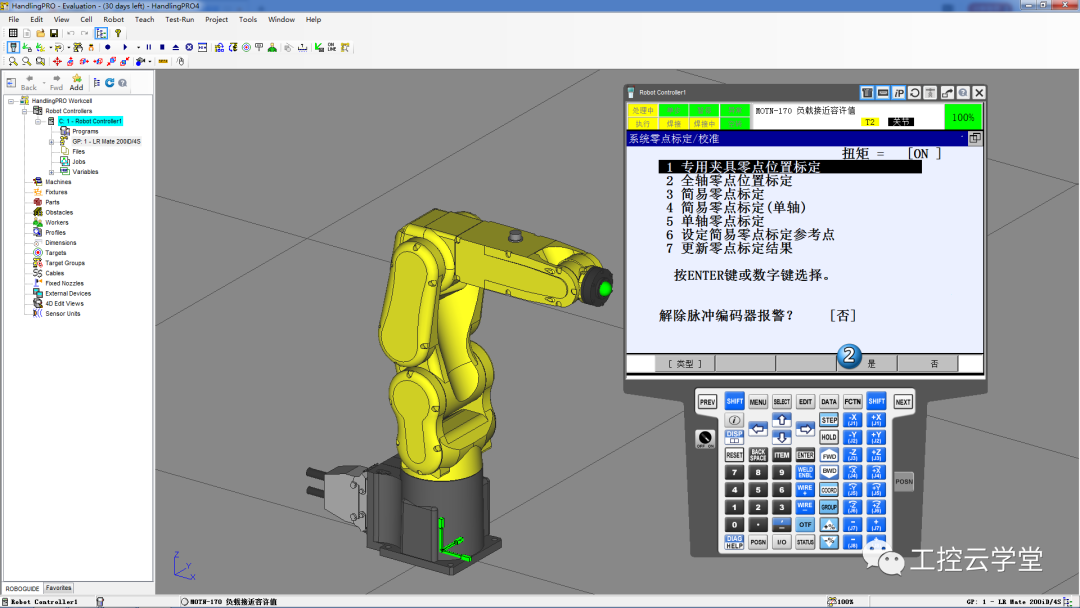
再次进入系统菜单就会发现“零点标定/校准”菜单了,这时我们进去进行操作。
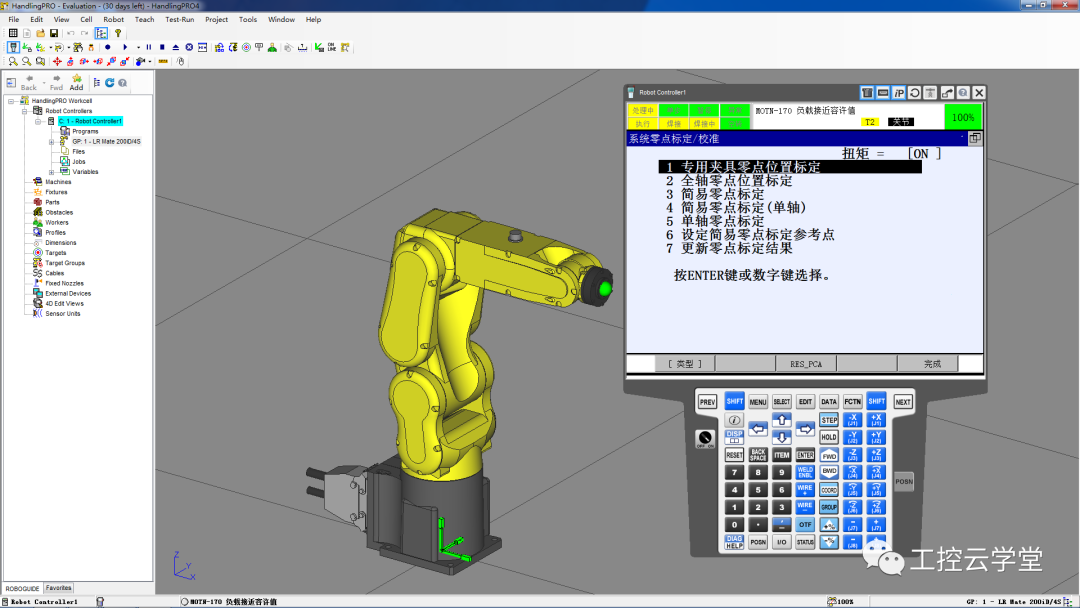
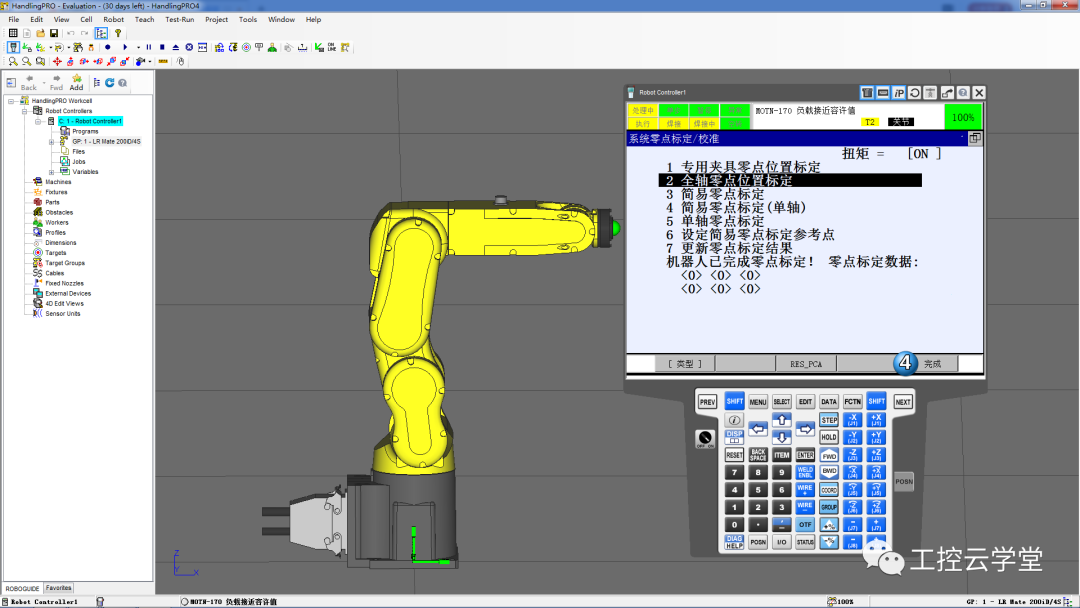
然后就会进入如下界面。
二、消除SRVO—062报警(此时机器人完全不可以动)
在电池电量耗尽,零位丢失,换完电池准备额零点标定时会遇到SRVO—062报警,这时候必须先消除这个报警,具体方法如下:
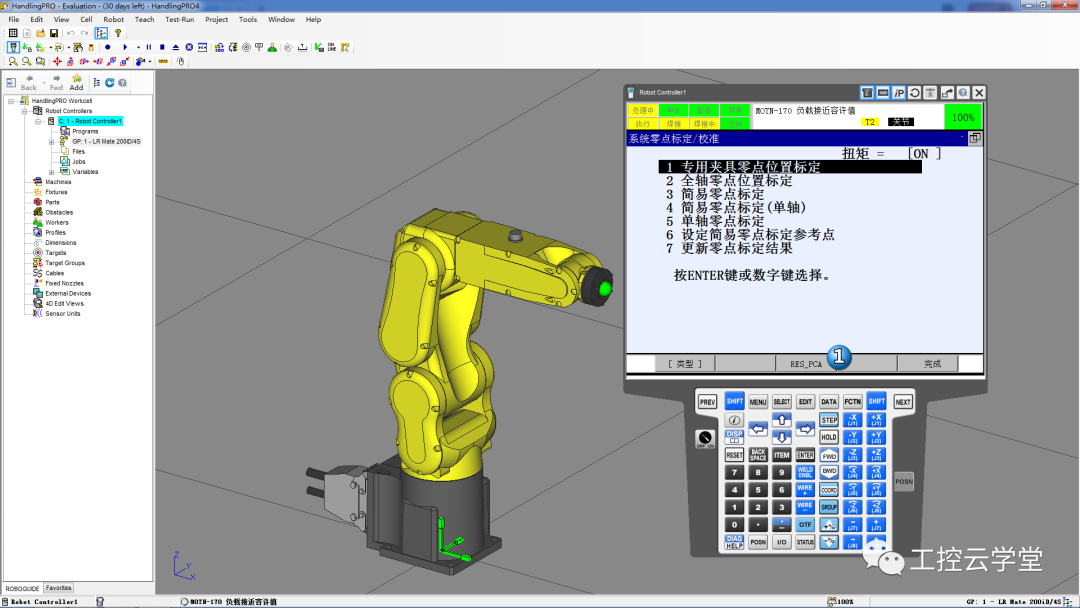
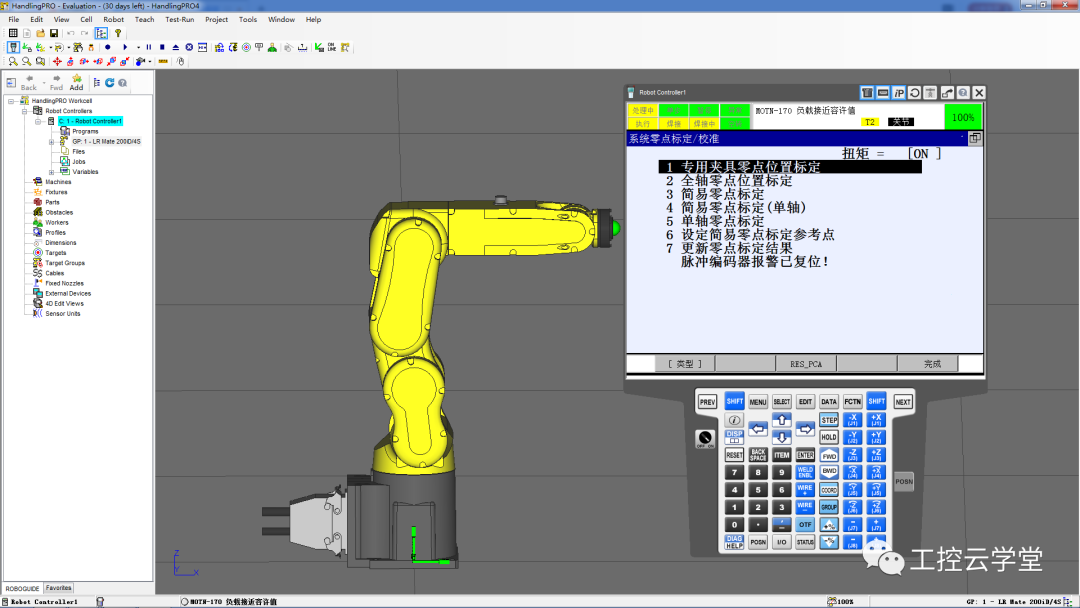
还是在这个界面按下F3“RES_PCA”复位编码器脉冲。
选择“是”关机,这样再开机机器人就可以单轴运动了。
三、若出现SRVO—075报警(此时机器人关节可动—即可以单轴运动)
消除该报警处理方法为使用示教器运动机器人报警轴关节20度左右,若有多个报警轴依次移动该报警轴20度左右即可消除该报警。
四、进行全轴零点标定
首先将机器人机械调零,调零顺序4-5-6-1-2-3(实际机器人每个周都有零位标记,请按该标记调整机器人到零位位置),即下图位置。
然后选择全轴零点位置标定
选择“是”。
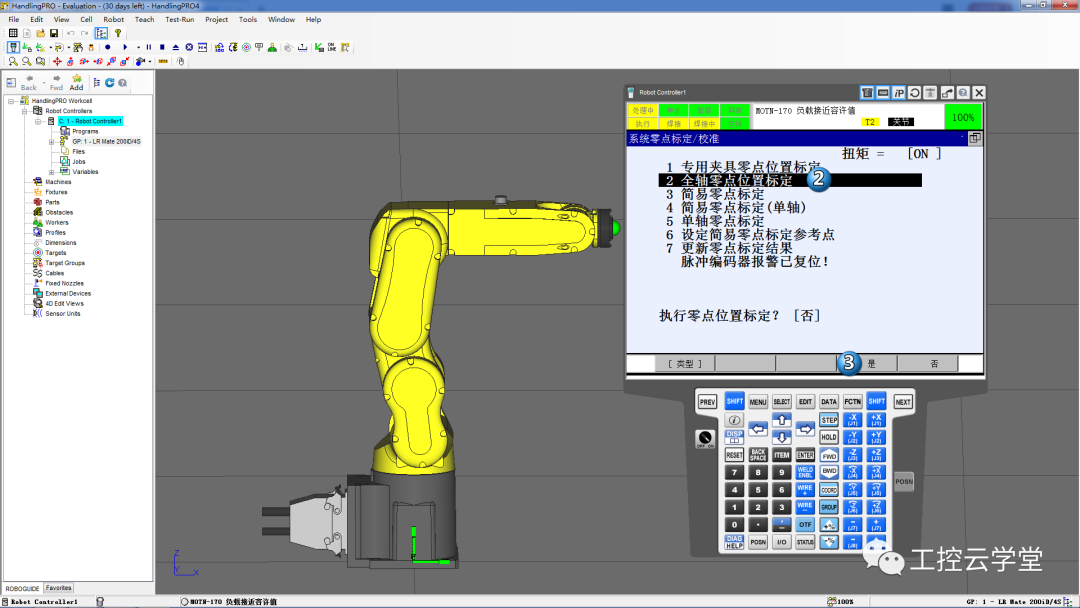
然后点击完成即可。
亲爱的朋友们,学会了吗?喜欢的向周围好朋友推荐下该公众号喔,每天都更新工控行业信息与干货呢!
如何成为优秀的工业机器人工程师?
扫码请咨询
▼
左老师:18817120052(同微信)

版权声明:本文为weixin_26712065原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。