一、原理部分
建议先学习定时器再学习中断定时器详解
什么是中断系统
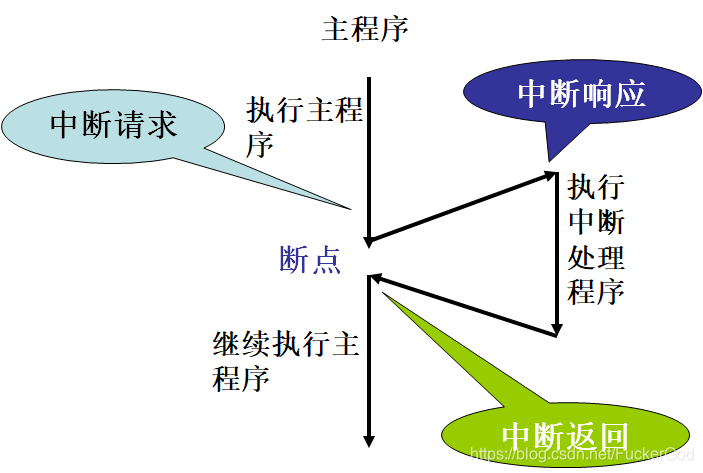
基本解释:计算机执行某程序,发生了紧急事件或有特殊请求,CPU暂停某程序的执行转而去处理上述事件或请求,处理完毕后再重新执行某程序的过程叫做中断。
为了我们更加方便的理解中断这个概念,举例:假设你正在吃饭,这时接到快递员电话叫你下楼去快递,只等5分钟,这就是中断请求。然后你回答:“好的,我现在就来”这个就是中断响应。接着你停止吃饭下楼取快递,这就是中断处理。取完快递你在回来接着吃饭,这就是中断返回。从以上可以看出,中断分为4个步骤:中断请求,中断响应,中断处理,中断返回。
数据的输入/输出传送方式
无条件传送方式:一方对另一方来说总是准备好的。.
查询传送方式(LOOK UP):传送前一方先查询另一方的状态,若已经准备好就传送,否则就继续查询/等待。
中断传送方式(IRQ): 一方通过申请中断的方式与另一方进行数据传送。
直接存储器存取方式(DMA):双方直接通过总线传送数据,不经CPU中转。适用于数据量大高速通讯的设备不占用CPU时间。
中断传送方式特点
数据传送的双方平时各自做自己的工作,一旦甲方要求与乙方进行数据传送,就主动发出信号提出申请,乙方接到申请后若同意传送,安排好当前的工作,再响应与甲方发生数据传送。完事后,回去继续做打断前的工作。
中断功能强弱是计算机性能优劣的重要标志
提高CPU效率
解决速度矛盾
实现并行工作
应付突发事…
中断系统结构
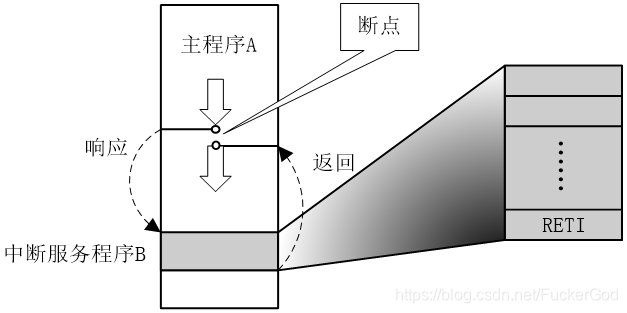
引起CPU中断的根源称为,中断源。中断源像CPU提出的中断请求。CPU暂时中断原来的事件A,转去处理事件B。对事件B处理完毕后,再回到原来被中断的地方(即断点),称为中断返回。实现上述中断功能的部件称为中断系统(中断机构)。
如何去使用单片机中断系统
芯片为STC15F2K60S2,以使用定时器0中断为例
允许中断
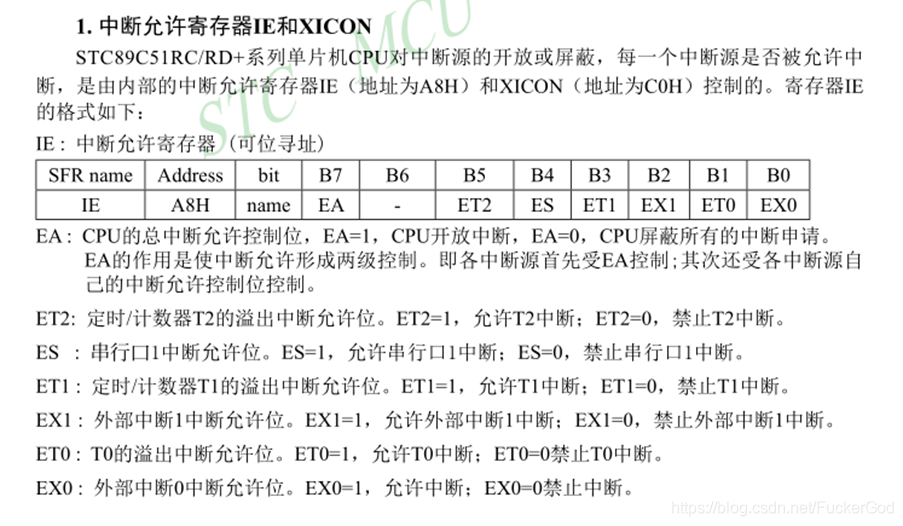
打开中断总开关EA=1,打开定时器0的中断开关ET0=1
配置中断方式
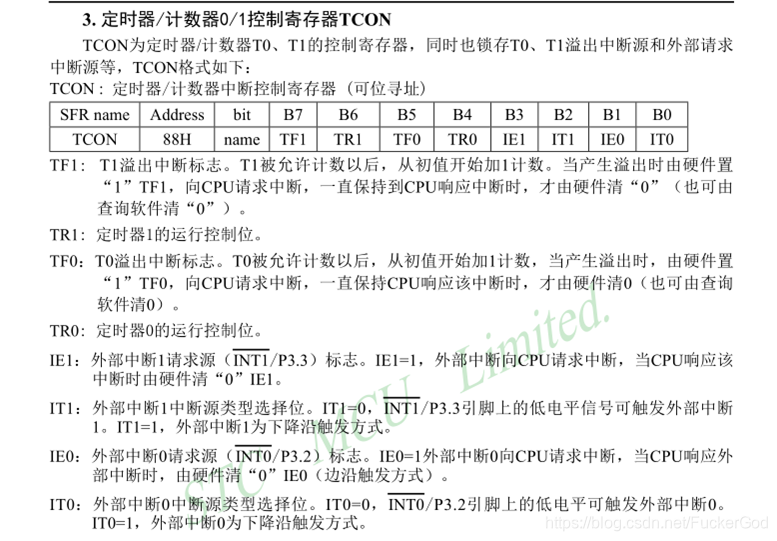
打开定时器0的开关TR0=1,清楚TF0标志,TF0=0
编写中断处理函数
中断优先级处理原则
对同时发生多个中断申请时:
不同优先级的中断同时申请(很难遇到)
先搞后低
相同优先级的中断同时申请(很难遇到)
按序执行
正处理低优先级中断又接到高级别中断
高打断低
正处理高优先级中断又接到低优先级中断
高不理低
单片机同优先级中内部查询顺序
内部查询顺序:在同时收到几个同一优先级的中断请求时,哪一个中断请求能优先得到响应,取决于内部的查询顺序。这相当于在同一优先级内,还存在另一辅助优先级结构,其查询顺序如下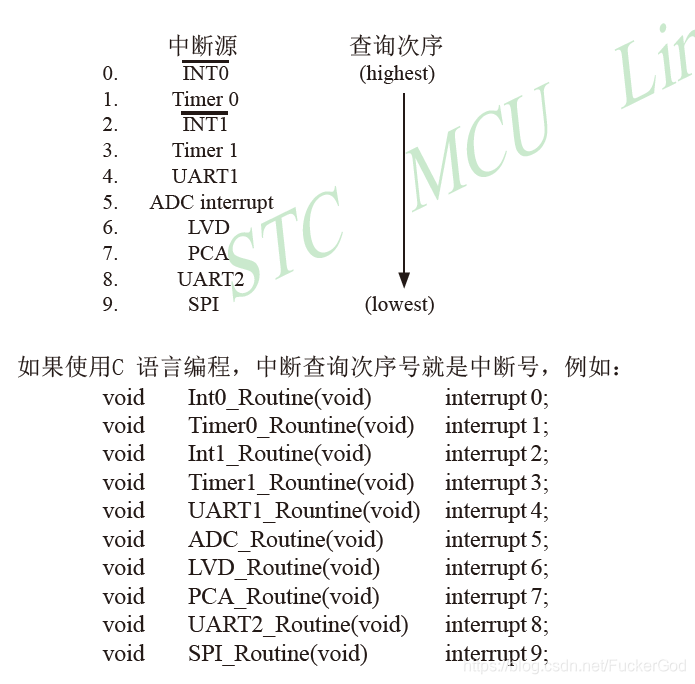
void init0() intterupt 1
{
//中断处理语句
}
总结
中断初始化函数
中断初始化函数放在主函数中
void Timer0Init(void) //2毫秒@11.0592MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x40; //设置定时初值
TH0 = 0xA2; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ER0 = 1; //打开定时器0中断开关
EA = 1; //打开总中断开关
}
中断处理函数
定时器0的时间到达后就会打断主函数中的程序,执行一次中断处理函数
中断系统会自动清除TF0 标志,所以不需要编写TF0=0单独使用定时器0时需要手动清除,
部分单片机不用重载,这里以防万一所以写上定时器初值
void init0() intterupt 1
{
TL0 = 0x40; //重装定时初值
TH0 = 0xA2; //重装定时初值
//中断处理语句
}
二、代码部分
实验平台:CT107D
实验芯片:stc15f2k60s2
实验现象:使用中断完成数码管动态扫描,显示数字12345678
代码如下
#include<stc15f2k60s2.h>
#define uchar unsigned char
#define uint unsigned int
sbit buzz = P0^6;
uchar code duan[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x00};//定义段码数组
uchar disbuff[8];//定义显示数字数字
void closebuzz()
{
P2 = 0xa0;
buzz = 0;
P2 = 0x00;
}
void shownum()//显示数字函数
{
disbuff[0]=1;
disbuff[1]=2;
disbuff[2]=3;
disbuff[3]=4;
disbuff[4]=5;
disbuff[5]=6;
disbuff[6]=7;
disbuff[7]=8;
}
void display()//数码管扫描函数
{
static uchar index = 0;
P2 = 0xe0;
P0 = 0xff;
P2 = 0x00;
P2 = 0xc0;
P0 = 1<<index;
P2 = 0x00;
P2 = 0xe0;
P0 = ~duan[disbuff[index]];
P2 = 0x00;
index++;
index &= 0x07;
}
void Timer0Init(void) //1毫秒@12.000MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x40; //设置定时初值
TH0 = 0xA2; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1 ;
}
void time0() interrupt 1
{
display();
}
void main()
{
closebuzz();
Timer0Init();
while(1)
{
shownum();
}
}