操作系统:Ubuntu16.04
ROS版本:Kinetic
方法一:用键盘控制小乌龟移动
1.启动ROS Master
打开终端,输入指令:
roscore
如图所示,ROS启动成功
2.打开小乌龟
打开一个新的终端,输入指令:
rosrun turtlesim turtlesim_node
这时就启动了小乌龟仿真器,其中turtlesim是包名,turtlesim_node是节点名。
出现小乌龟的窗口,小乌龟可能每次启动时样子都不一样。
3.键盘控制小乌龟
再打开一个新的终端,输入指令:
rosrun turtlesim turtle_teleop_key
启动小乌龟控制节点
出现如下结果:
此时就可以通过键盘的四个方向键控制小乌龟移动了。
方法二:通过命令发布话题控制小乌龟移动
前两步同方法一,第三步在终端中输入如下命令,可以通过Tab键补齐:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
rostopic pub:通过命令发布话题消息
左右移动光标,修改参数,通过命令的方式控制小乌龟移动
上面那条指令只能让小乌龟移动一次,如果想要持续移动,只需输入下面这条指令。
rostopic pub -r 3 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
r 代表 rate,后面跟的数字代表一秒发布话题的次数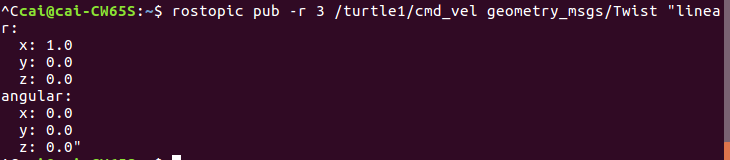
成功移动!
版权声明:本文为caiguanhong原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。