假设有以下工程文件: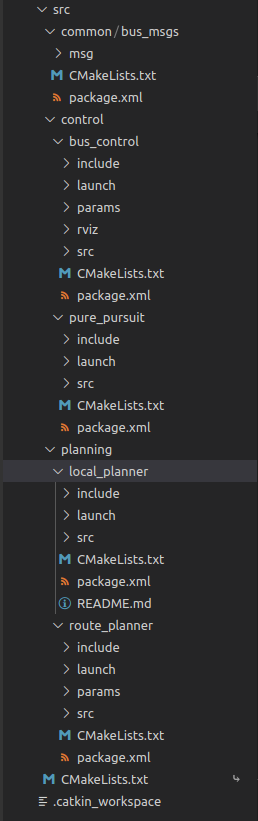
其中bus_control是主文件,而pure_pursuit、planing均是其依赖文件。
在bus_control层级的CMakeLists.txt写法:
cmake_minimum_required(VERSION 3.0.2)
project(bus_control)
# set(CMAKE_BUILD_TYPE Release)
SET(CMAKE_BUILD_TYPE Debug)
## Compile as C++11, supported in ROS Kinetic and newer
add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
tf
tf2_ros
bus_msgs
nav_msgs
geodesy
route_planner
pure_pursuit
)
## System dependencies are found with CMake's conventions
find_package(Boost REQUIRED COMPONENTS system)
find_package(Eigen3 REQUIRED)
catkin_package(
CATKIN_DEPENDS
roscpp
rospy
std_msgs
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
include
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
)
## Declare a C++ library
add_library(bus_control
src/bus_control.cc
src/pid_controller.cc
)
target_link_libraries(bus_control
${catkin_LIBRARIES}
${Boost_LIBRARIES}
)
add_dependencies(bus_control ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_executable(bus_control_node src/bus_control_node.cc)
add_dependencies(bus_control_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(bus_control_node
${catkin_LIBRARIES}
bus_control
)
#############
## Install ##
#############
install(TARGETS
bus_control
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
install(TARGETS bus_control_node
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
install(DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.h"
PATTERN ".svn" EXCLUDE
)
install(DIRECTORY rviz
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
install(DIRECTORY params
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
install(FILES
launch/bus_control.launch
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/launch
)
而以pure_pursuit为例,其CMakeLists.txt写法,planning模块类似:
cmake_minimum_required(VERSION 3.0.2)
project(pure_pursuit)
add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
jsk_recognition_msgs
message_generation
roscpp
roslint
rosunit
sensor_msgs
tf
bus_msgs
geodesy
geographic_msgs
)
find_package(Eigen3 QUIET)
if (NOT EIGEN3_FOUND)
# Fallback to cmake_modules
find_package(cmake_modules REQUIRED)
find_package(Eigen REQUIRED)
set(EIGEN3_INCLUDE_DIRS ${EIGEN_INCLUDE_DIRS})
set(EIGEN3_LIBRARIES ${EIGEN_LIBRARIES}) # Not strictly necessary as Eigen is head only
# Possibly map additional variables to the EIGEN3_ prefix.
else ()
set(EIGEN3_INCLUDE_DIRS ${EIGEN3_INCLUDE_DIR})
endif ()
catkin_package(
INCLUDE_DIRS include
LIBRARIES pure_pursuit
# CATKIN_DEPENDS geometry_msgs jsk_recognition_msgs message_generation roscpp roslint rosunit sensor_msgs tf
# DEPENDS system_lib
)
###########
## Build ##
###########
include_directories(
include
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
)
add_library(libwaypoint_follower src/libwaypoint_follower.cpp)
add_dependencies(libwaypoint_follower ${catkin_EXPORTED_TARGETS})
target_link_libraries(libwaypoint_follower ${catkin_LIBRARIES})
add_library(pure_pursuit
src/pure_pursuit.cpp
src/pure_pursuit_viz.cpp
src/pure_pursuit_node.cpp
)
target_link_libraries(pure_pursuit
${catkin_LIBRARIES}
libwaypoint_follower
)
add_dependencies(pure_pursuit ${catkin_EXPORTED_TARGETS})
install(TARGETS libwaypoint_follower
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
)
install(TARGETS pure_pursuit
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
)
然后使用catkin_make install编译与安装,会在src层级生成install文件夹,其内容为

其中lib文件夹:
share文件夹:
bus_control文件夹:
相应的launch参数,param设置可以在这里设置。
程序运行?可以拷贝install文件到任意目录,然后
source setup.bash
roslaunch bus_control bus_control.launch
即可运行程序。
版权声明:本文为lzy6041原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。