1.最小生成树
生成树:所有顶点均由边连接在一起,但不存在回路的图。
一个图可以有许多棵不同的生成树。
所有生成树具有以下共同特点:
生成树的顶点个数与图的顶点个数相同;
生成树是图的极小连通子图,去掉一条边则非连通;
一个有n个顶点的连通图的生成树有n-1条边;
在生成树中再加一条边必然形成回路;
生成树中任意两顶点间的路径是唯一的;
含n个顶点n-1条边的图不一定是生成树。
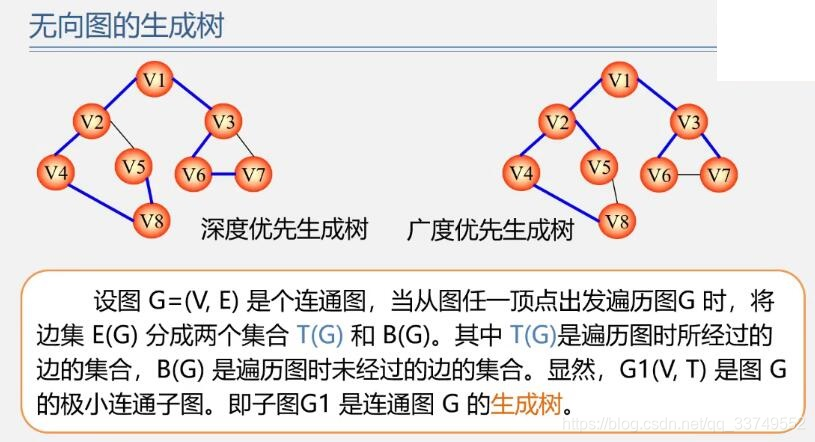
无向图的生成树
深度优先生成树
广度优先生成树
最小生成树:给定一个无向网络,在该网的所有生成树中,使得各边权值之和最小的那棵生成树称为该网的最小生成树,也叫最小代价生成树
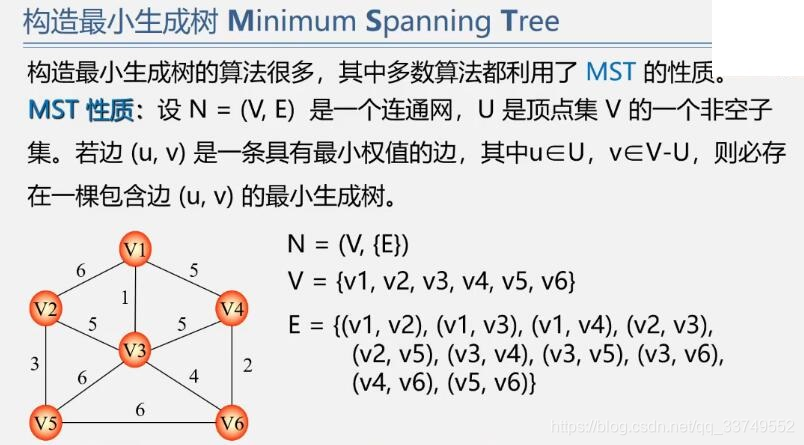
构造最小生成树(MST)
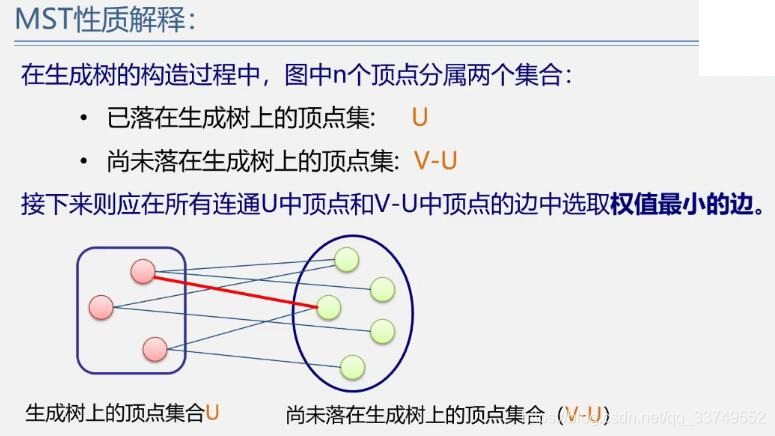
MST性质解释:
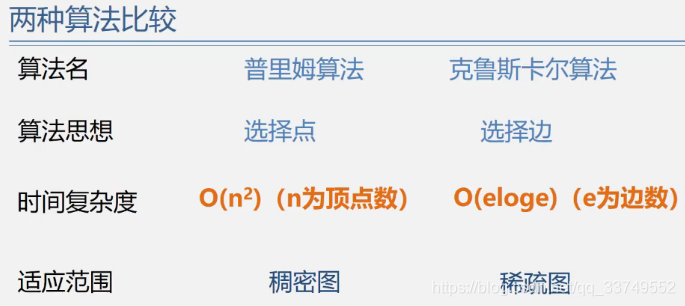
构造最小生成树方法一:普里姆(Prim)算法
指定一个点,选择与该点连接的权值最小的点,选择到的点再次选择与该点连接的权值最小的点

构造最小生成树方法二:克鲁斯卡尔(Kruskal)算法
循环查找权值最小的边

最小生成树可能不唯一
两种算法比较
2.最短路径
典型用途:交通网络的问题--两地之间的最短路径
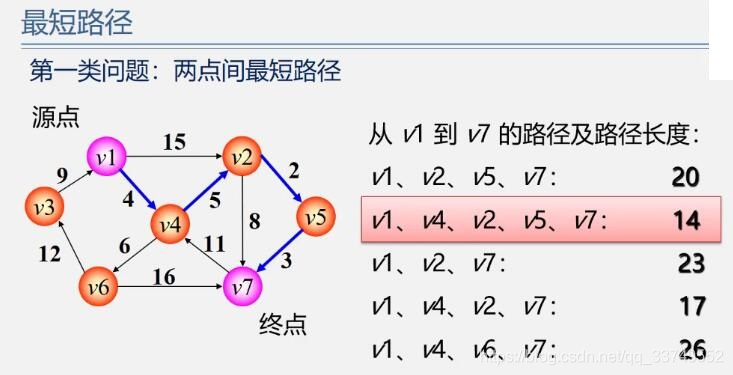
问题抽象:在有向网中A点(源点)到达B点(终点)的多条路径中,寻找一条各边权值之和最小的路径,即最短路径。
最短路径与最小生成树不同,路径不一定包含n个顶点,也不一定包含n-1条边。
第一类问题:两点间最短路径
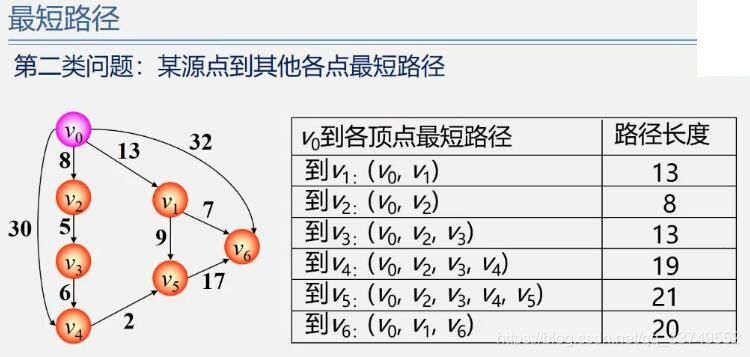
第二类问题:某源点到其他各点最短路径
两种常见的最短路径问题:
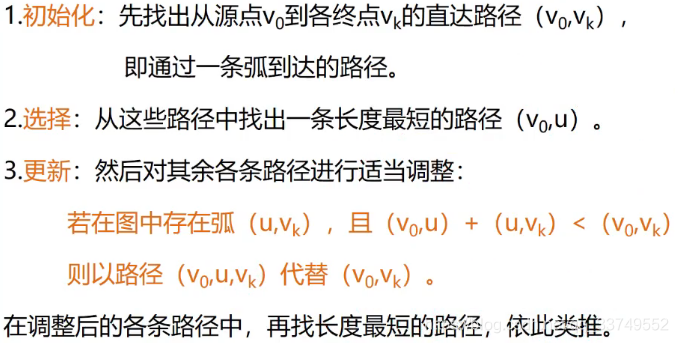
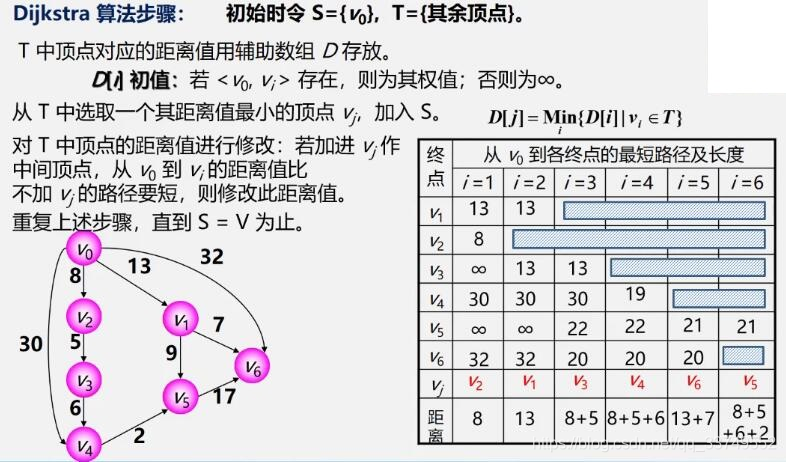
一、单源最短路径用Dijkstra(迪杰斯特拉)算法
二、所有顶点间的最短路径用Floyd(弗洛伊德)算法
Dijkstra(迪杰斯特拉)算法 时间复杂度O(n2)
指定一个源点,分别计算到其他点的路径长度,选取最小的一个,然后用着两个点,再去找第三个点....
所有顶点间的最短路径
方法一:每次以一个顶点为源点,重复执行Dijkstra算法n次。 时间复杂度O(n3)
方法二:Floyd(弗洛伊德)算法 时间复杂度O(n3)
先用二位数组算各个路径的长度,加入一个点,从第一个点开始加,只算一个点,利用这个点,再算到其他点的路径长度,知道把所有的点都加上
算法思想:
逐个顶点试探
从vi到vj的所有可能存在的路径中
选出一条长度最短的路径

3.拓扑排序
有向无环图及其应用
有向无环图:无环的有向图,简称DAG图
AOV网:(解决拓扑排序问题)
用一个有向图表示一个工程的各个子工程及其相互制约的关系,其中以顶点表示活动,弧表示活动之间的优先制约关系,称这种有向图为顶点表示活动的网,简称AOV网
AOE网:(解决关键路径问题)
用一个有向图表示一个工程的各个子工程及其相互制约的关系,其中以弧表示活动,顶点表示活动的开始或结束事件,称这种有向图为边表示活动的网,简称AOE网
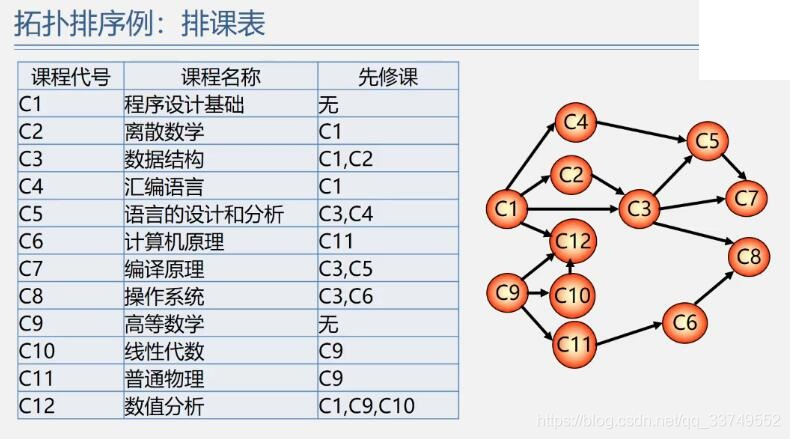
拓扑排序例子:排课表
AOV网特点:
若从i到j有一条有向路径,则i是j的前驱,j是i的后继。
若<i,j>是网中有向边,则i是j的直接前驱,j是i的直接后继。
AOV网中不允许有回路,因为如果有回路存在,则表明某项活动以自己为先决条件,显然这是荒谬的。
问题:如何判断AOV网中是否有回路
拓扑排序:
在AOV网中没有回路的前提下,我们将全部活动排列成一个线性序列,使得若AOV网中有弧<i,j>存在,则在这个序列中,i一定排列在j的前面,具有这种性质的线性序列称为拓扑有序排列,相应的拓扑有序排列的算法称为拓扑排序。
拓扑排序的方法:
1.在有向图中选一个没有前驱的顶点输出。
2.在图中删除该顶点和所有以它为尾的弧。
3.重复上述两个步骤,直至全部顶点均已输出;或者当图中不存在无前驱的顶点为止。
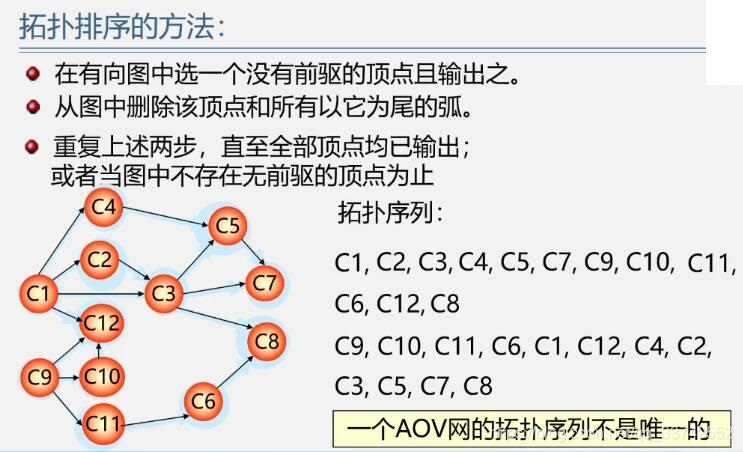
一个AOV网的拓扑序列不是唯一的
在图中存在i->j的一条边,拓扑序列一定是先输出i,在输出j
检测AOV网中是否存在环的方法:对有向图构造其顶点的拓扑有序序列,若网中所有顶点都在它的拓扑有序序列中,则该AOV网必定不存在环。
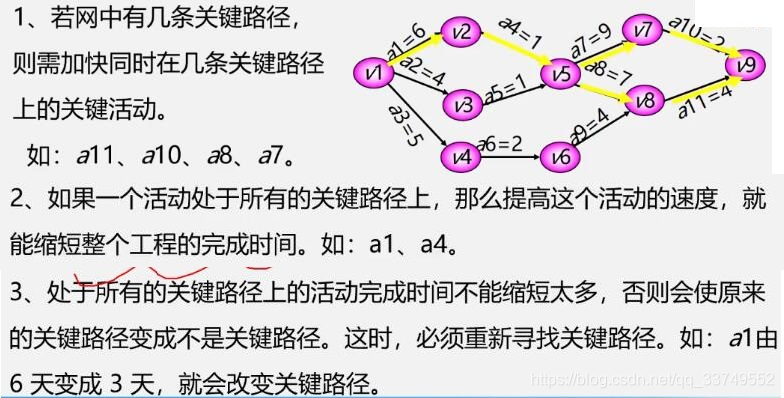
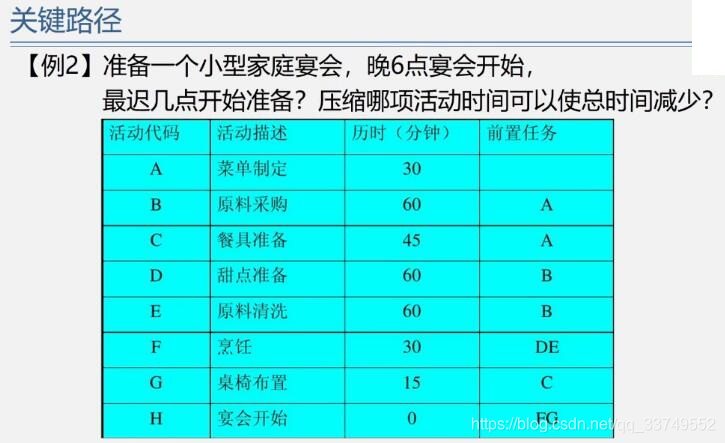
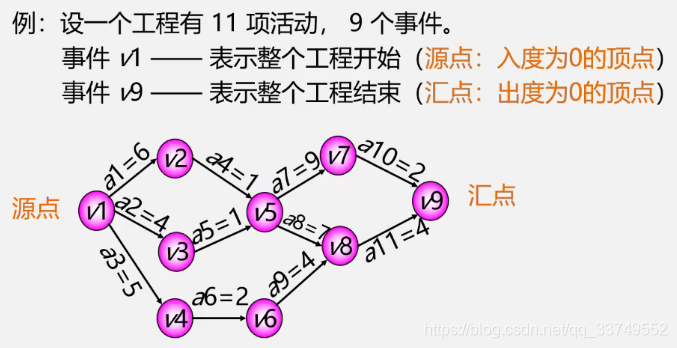
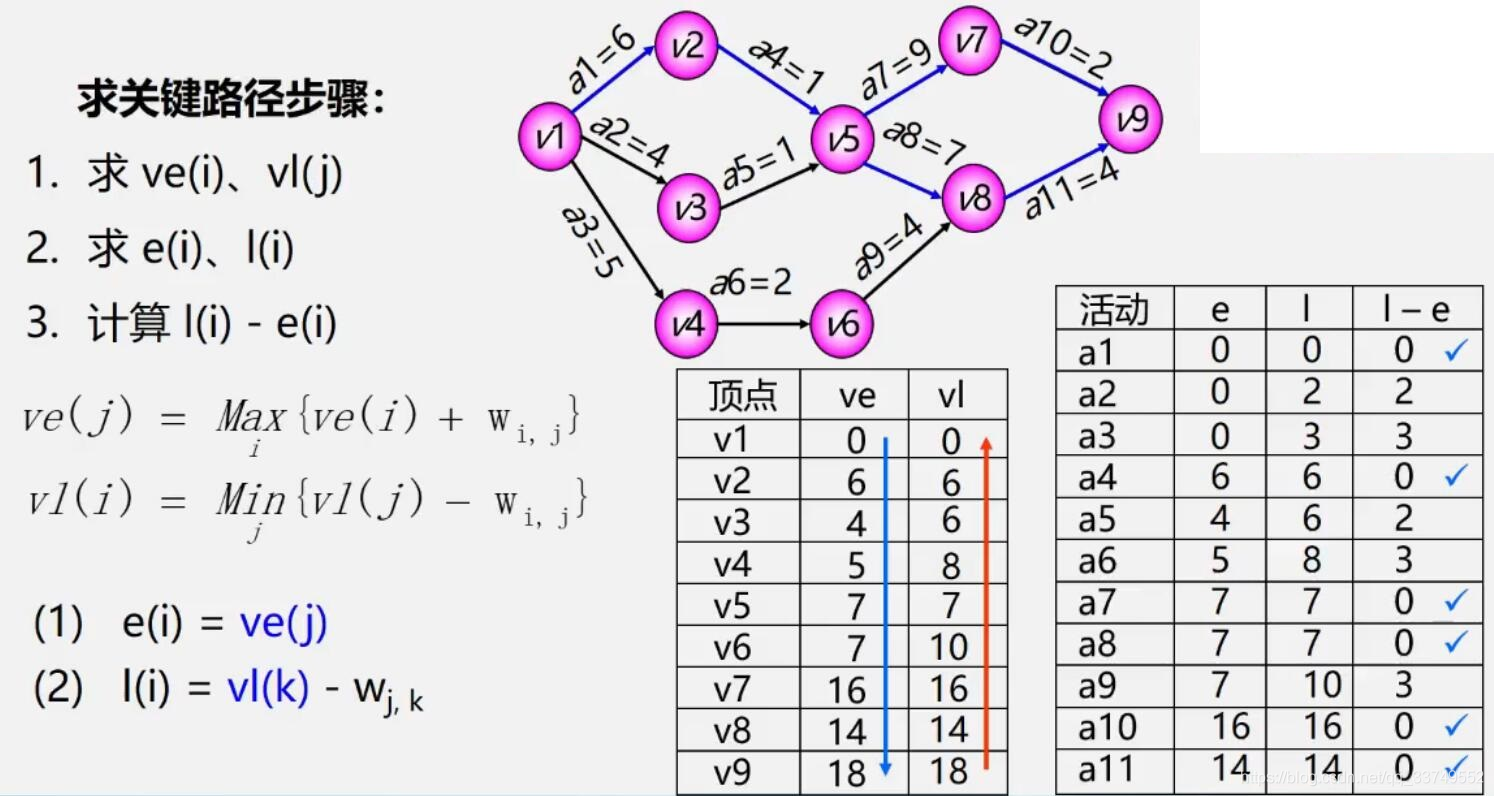
4.关键路径
把工程计划表示为边表示活动的网络,即AOE网,用顶点表示事件,弧表示活动,弧的权表示活动持续时间。
事件表示在它之前的活动已经完成,在它之后的活动可以开始。
关键路径——路径长度最长的路径
路径长度——路径上个活动持续时间之和
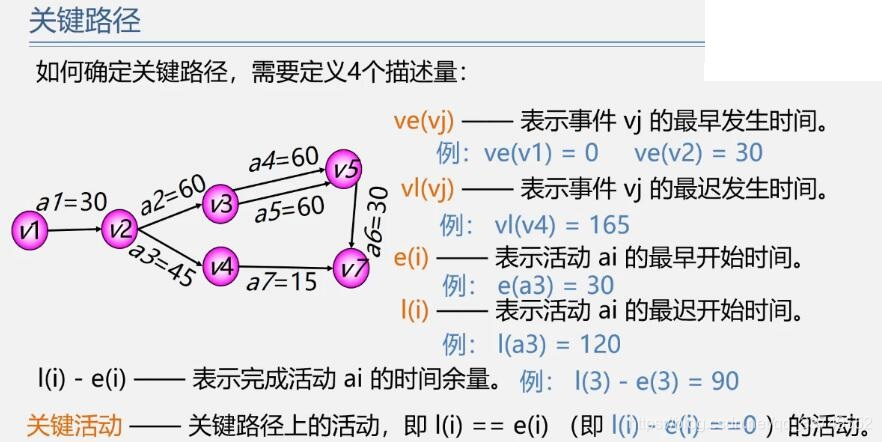
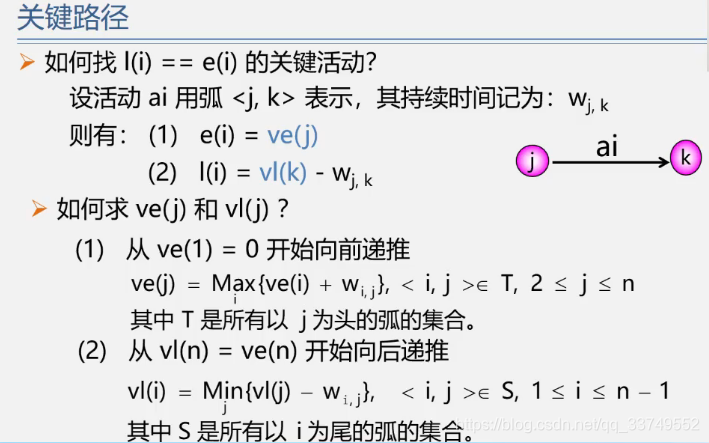
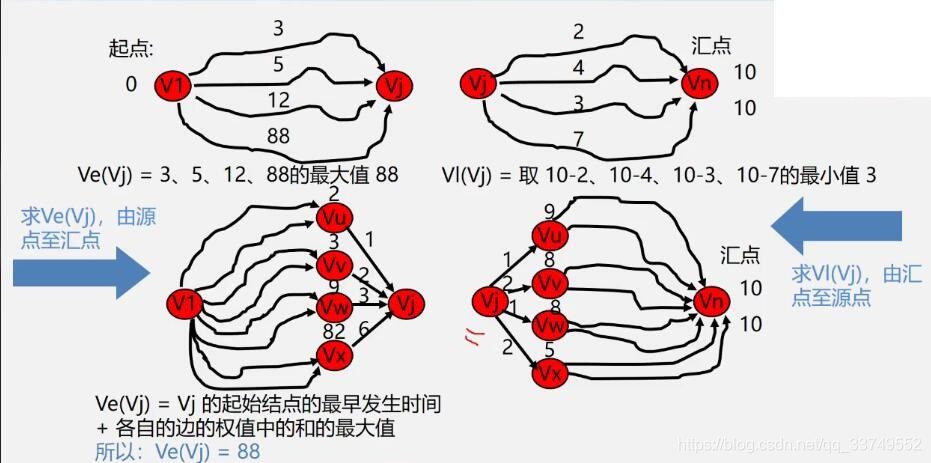
最早发生时间是指向这个结点之前的路径的最大值,要等第一层盖完了,再去盖第二层,从前往后算
最晚发生时间是指最长可以拖多长时间,从后往前算
关键路径的讨论