上海疫情被困在家,机器人不在身边,为此,我用我的老伙计笔记本实现的一套基于多传感器融合的机器人导航、建图仿真。我将以造轮子的思想一一阐述搭建过程。
第一章 win10系统下的虚拟机安装
1.1 从官网下载VMware
此处为官网链接,
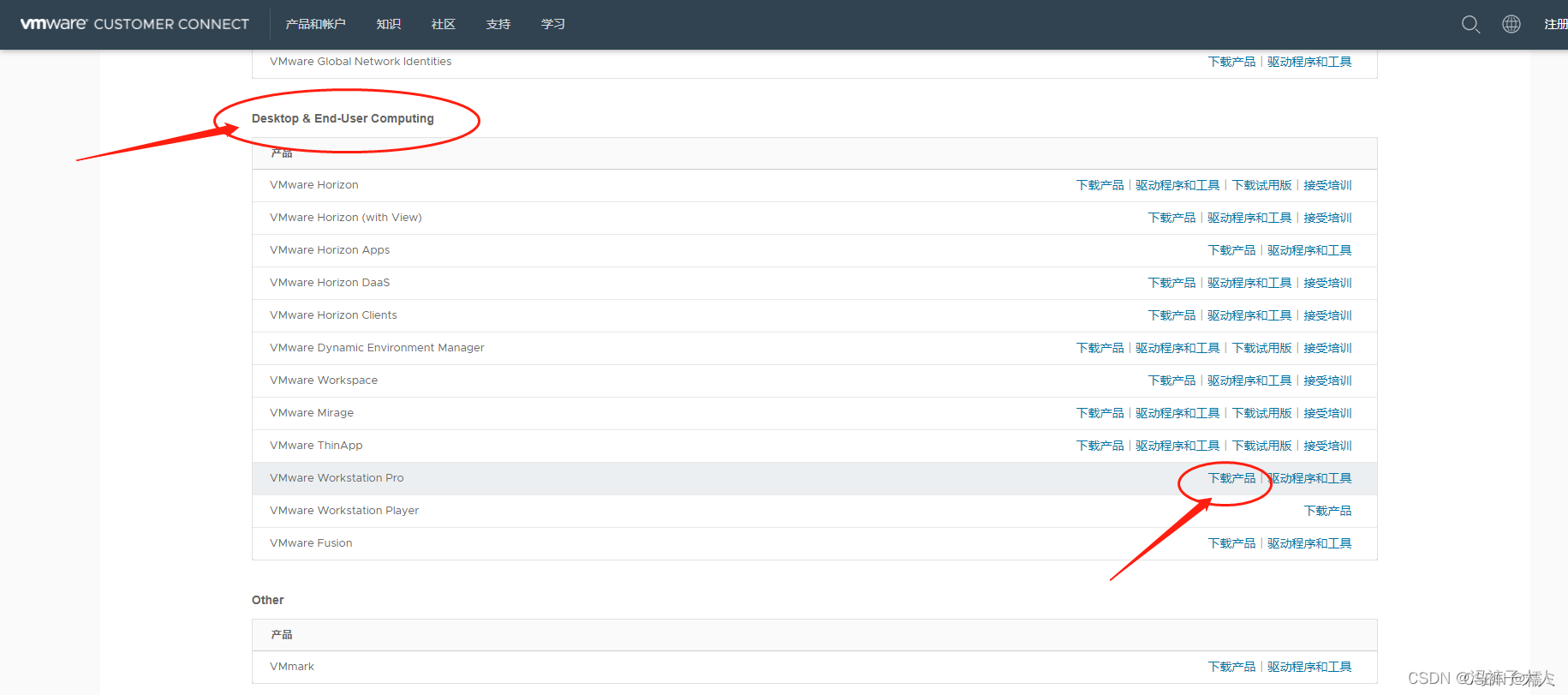
选择下载产品,进入新的页面

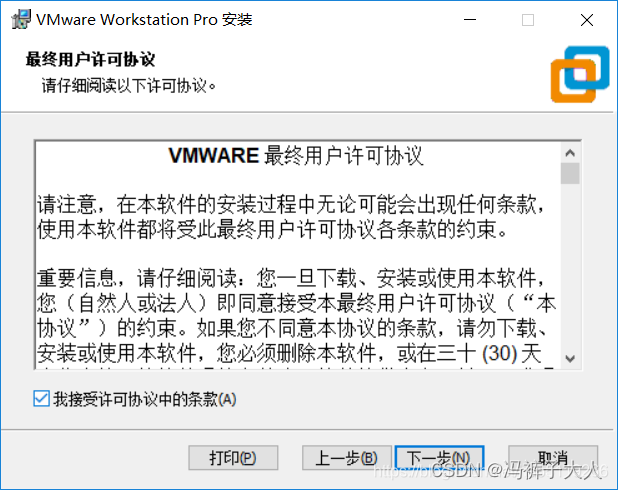
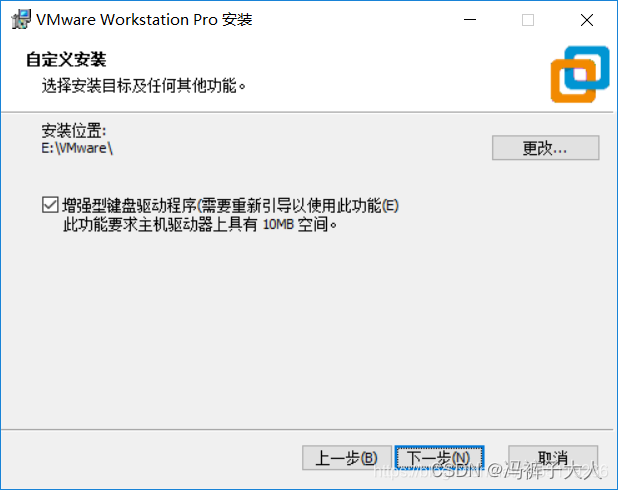
1.2 安装虚拟机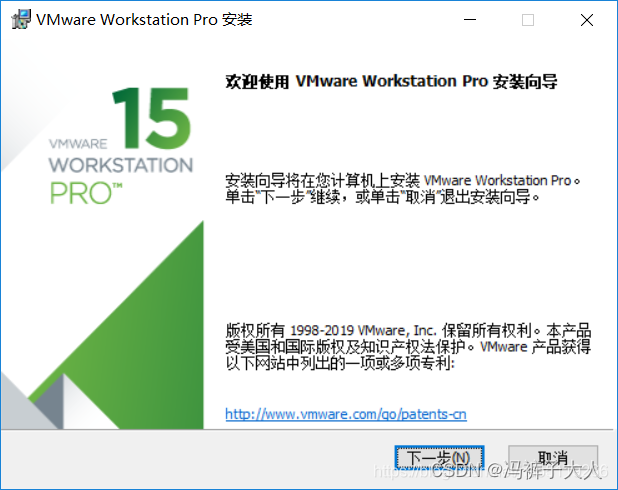

第二章 虚拟机下ubuntu 18.04的安装
第三章 ubuntu 18.04下的ros安装
第四章 rtabmap的安装
第五章 建图
第六章 导航
第七章 优化(2D雷达换成3D)
第八章 3D雷达预处理
第九章 总结
版权声明:本文为weixin_43875486原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。