1.图像的矩
参考链接:https://blog.csdn.net/qq_37207090/article/details/83986950。
图像矩是通过对轮廓上所有点进行积分运算而得到的一个粗略特征,对于图像函数f ( x , y ) f(x,y)f(x,y),图像的p + q p+qp+q几何矩定义如下:
m p q = ∫ − ∞ ∞ ∫ − ∞ ∞ x p y q f ( x , y ) d x d y m_{pq}=\int_{-\infty}^\infty\int_{-\infty}^\infty x^py^qf(x,y)dxdympq=∫−∞∞∫−∞∞xpyqf(x,y)dxdy
其中p pp与q qq的取值范围为[ 0 , + ∞ ) [0,+\infty)[0,+∞),图像的p + q p+qp+q阶中心矩定义如下:
μ p q = ∫ − ∞ ∞ ∫ − ∞ ∞ ( x − x − ) p ( y − y − ) q f ( x , y ) d x d y \mu_{pq}=\int_{-\infty}^\infty\int_{-\infty}^\infty (x-x^-)^p(y-y^-)^qf(x,y)dxdyμpq=∫−∞∞∫−∞∞(x−x−)p(y−y−)qf(x,y)dxdy
其中p pp与q qq的取值范围为[ 0 , + ∞ ) [0,+\infty)[0,+∞),x − x^-x−与y − y^-y−代表图像的质心。对于离散的数字图像,积分变换转换为求和变换后,几何矩和中心矩公式如下:
m p q = ∑ y = 1 N ∑ x = 1 M x p y q f ( x , y ) m_{pq}=\sum_{y=1}^{N} \sum_{x=1}^{M}x^py^qf(x,y)mpq=y=1∑Nx=1∑Mxpyqf(x,y)
μ p q = ∑ y = 1 N ∑ x = 1 M ( x − x − ) p ( y − y − ) q f ( x , y ) \mu_{pq}=\sum_{y=1}^{N} \sum_{x=1}^{M}(x-x^-)^p(y-y^-)^qf(x,y)μpq=y=1∑Nx=1∑M(x−x−)p(y−y−)qf(x,y)
其中p pp与q qq的取值范围为[ 0 , + ∞ ) [0,+\infty)[0,+∞),M MM与N NN分别代表图像的宽度和高度。归一化的中心矩定位为:
η p q = μ p q ( μ 00 ) ρ \eta_{pq}=\frac{\mu_{pq}}{(\mu_{00})^\rho}ηpq=(μ00)ρμpq,其中ρ = p + q 2 + 1 \rho=\frac{p+q}{2}+1ρ=2p+q+1,其中p pp是x xx的维度,其中q qq是y yy的维度,阶段表示参数的指数关系
利用二阶和三阶规格中心矩可以导出下面7个不变矩组(Φ1 Φ7),它们在图像平移、旋转和比例变化时保持不变。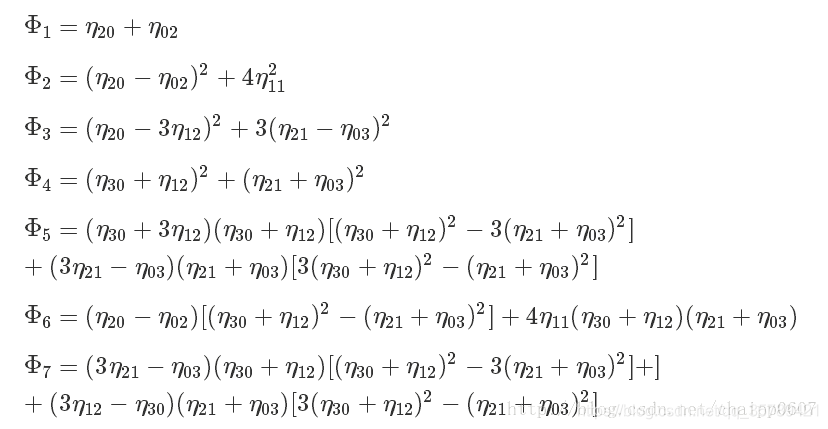
2.Opencv相关函数
Opencv提供了函数moments()用来计算图像中所有的矩(最高到三阶),contourArea()用来计算轮廓面积,arcLength()用来计算轮廓或曲线长度。
Moments moments(InputArray array,bool binaryImage=false);
该函数用来计算所有三阶多边形或栅格形状的矩,参数array表示输入光栅图像(单通道,8位或32位浮点二维数组)或二维点集。binaryImage设为true时,所有的非零图像像素被认为是1。
点多边形测试用于判断点集是否在被测多边形的内部,是轮廓点集判断的重要技术之一。Opencv专门提供了专门用于点多边形测试的函数pointPolygonTest(),用来检测点是否在多边形内部:
double pointPolygonTest(InputArray contour,Point2f pt,bool measureDist);
参数contour是输入轮廓,pt表示对轮廓点进行测试,measureDist是标志位,如果设置为true,则函数会返回该点到轮廓最近点的有符号的欧式距离,即点在曲线内时,距离为正,点在曲线外为负,点在轮廓上的距离返回为零。如果设置成false,函数会返回相应的距离(1,-1,0)。