在介绍Redis的网络模型之前,先来介绍用户态和内核态、常见的网络模型种类,再来详解网络模型在Redis中的具体实现,从而理解Redis网络模型的来龙去脉。
1、用户态和内核态空间
服务器大多都采用Linux系统,ubuntu和Centos 都是Linux的发行版,发行版可以看成对linux包了一层壳,任何Linux发行版,其系统内核都是Linux,软件应用都需要通过Linux内核与硬件交互。
用户的应用,比如redis,mysql等都是没有办法去直接执行、访问操作系统硬件的,需要通过Linux发行版(centos、ubuntu)去访问内核,再通过内核去访问计算机硬件

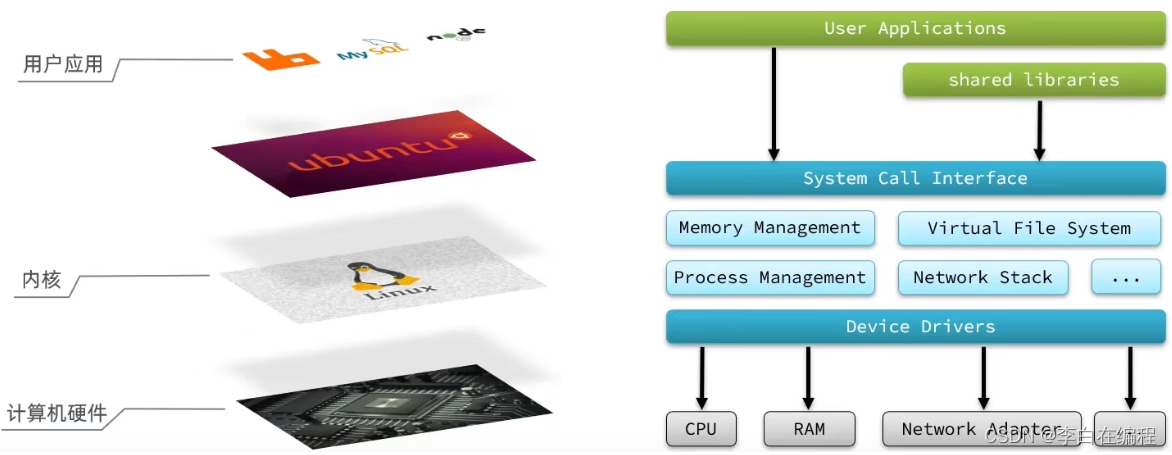
计算机硬件包括,如cpu,内存,网卡等,内核(通过寻址空间)可以操作硬件的,但是内核需要不同设备的驱动,通过设备驱动,内核就可以实现计算机硬件的内存管理,文件系统管理,进程管理等。
如果要让用户应用来访问,计算机就必须要对外暴露一些接口,才能访问,实现对内核的操控,但是内核本身上来说也是一个应用,所以他本身也需要一些内存,cpu等设备资源,用户应用本身也在消耗这些资源,如果不加任何限制,用户去操作随意的去操作我们的资源,就有可能导致一些冲突,甚至有可能导致我们的系统出现无法运行的问题,因此我们需要把用户空间和内核空间隔离开
进程的寻址空间划分成两部分:内核空间、用户空间
在linux中,他们权限分成两个等级,0和3,用户空间只能执行受限的命令(Ring3),而且不能直接调用系统资源,必须通过内核提供的接口来访问内核空间可以执行特权命令(Ring0),调用一切系统资源,所以一般情况下,用户的操作是运行在用户空间,而内核运行的数据是在内核空间的,而如果
应用程序需要去调用一些特权资源,执行关于内核空间的操作,就需要在用户态和内核态之间进行切换。比如:
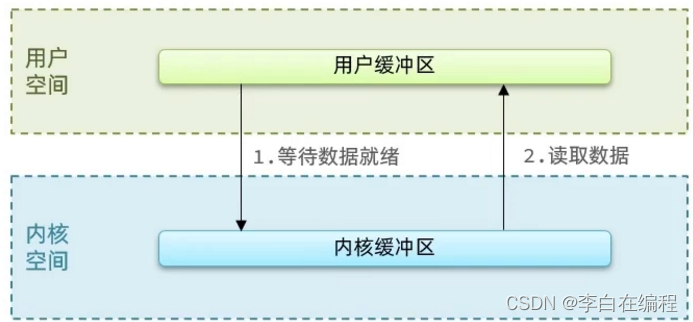
- Linux系统为了提高IO效率,会在用户空间和内核空间都加入缓冲区:
- 写数据时,要把用户缓冲数据拷贝到内核缓冲区,然后写入设备
- 读数据时,要从设备读取数据到内核缓冲区,然后拷贝到用户缓冲区
针对这个操作:用户在写读数据时,会去向内核态申请,想要读取内核的数据,而内核数据要去等待驱动程序从硬件上读取数据,当从磁盘上加载到数据之后,内核会将数据写入到内核的缓冲区中,然后再将数据拷贝到用户态的buffer中,然后再返回给应用程序,整体而言,磁盘I/O的速度慢,因此,我们希望read也好,还是wait for data,还是用户空间和内核空间的缓冲区之间的数据拷贝,最好都不要等待,或者时间尽量的短。
2、网络模型之阻塞IO
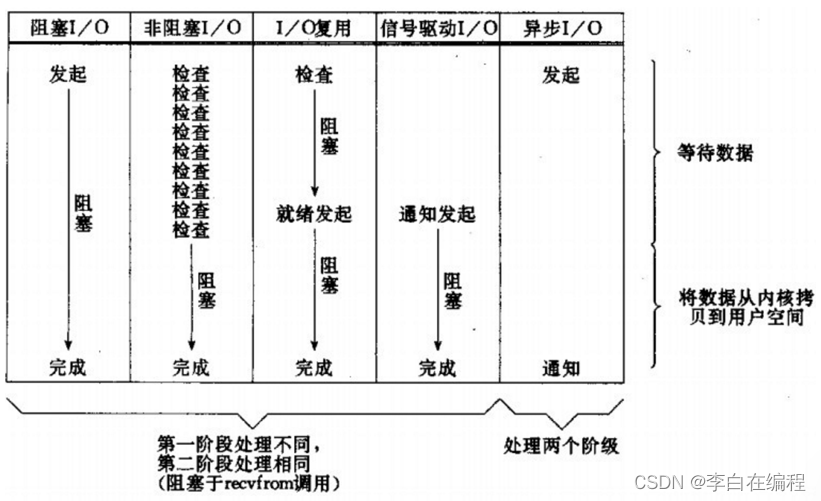
在《UNIX网络编程》一书中,总结归纳了5种IO模型:
阻塞IO(Blocking IO)
非阻塞IO(Nonblocking IO)
IO多路复用(IO Multiplexing)
信号驱动IO(Signal Driven IO)
异步IO(Asynchronous IO)
网络模型的关键在于等待数据就绪 和读取数据这两个过程,应用程序想要去读取数据,是无法直接去读取磁盘数据的,需要先到内核态去等待 内核操作硬件拿到数据,这个过程就是1,是需要等待的,等到内核从磁盘上把数据加载出来之后,再把这个数据写给用户的缓存区,这个过程是2,如果是阻塞IO,那么整个过程中,用户从发起读请求开始,一直到读取到数据,都是一个阻塞状态。
阻塞IO就是等待数据就绪和读取数据这两个阶段都必须阻塞等待:
阶段一:
- 用户进程尝试读取数据(比如网卡数据)
- 此时数据尚未到达,内核需要等待数据,此时用户进程也处于阻塞状态
阶段二:
- 数据到达并拷贝到内核缓冲区,表示数据准备已经就绪
- 将内核数据拷贝到用户缓冲区,拷贝过程中,用户进程依然阻塞等待
- 拷贝完成,用户进程解除阻塞,处理数据
可以看到,阻塞IO模型中,用户进程在两个阶段都是阻塞状态。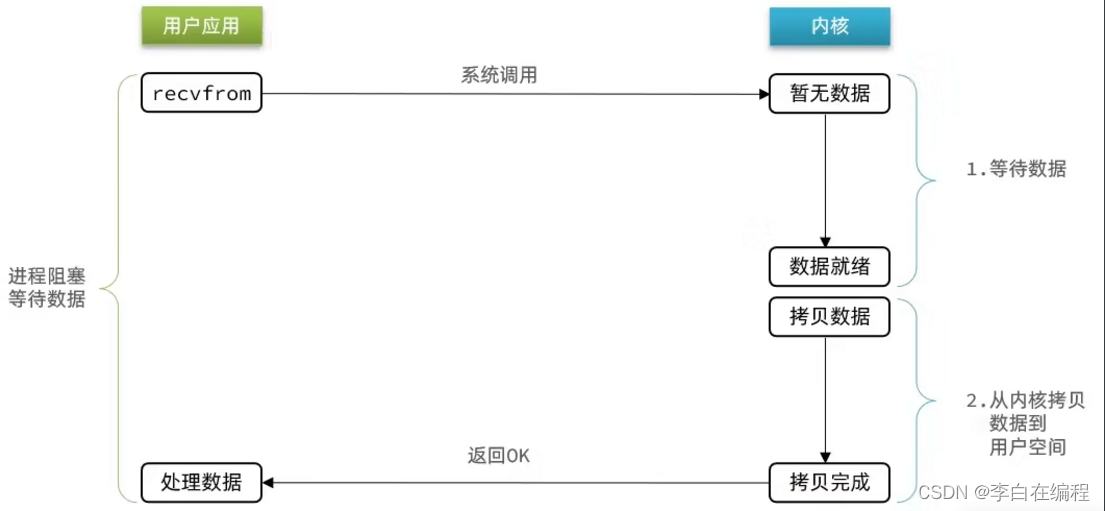
3、网络模型之非阻塞IO
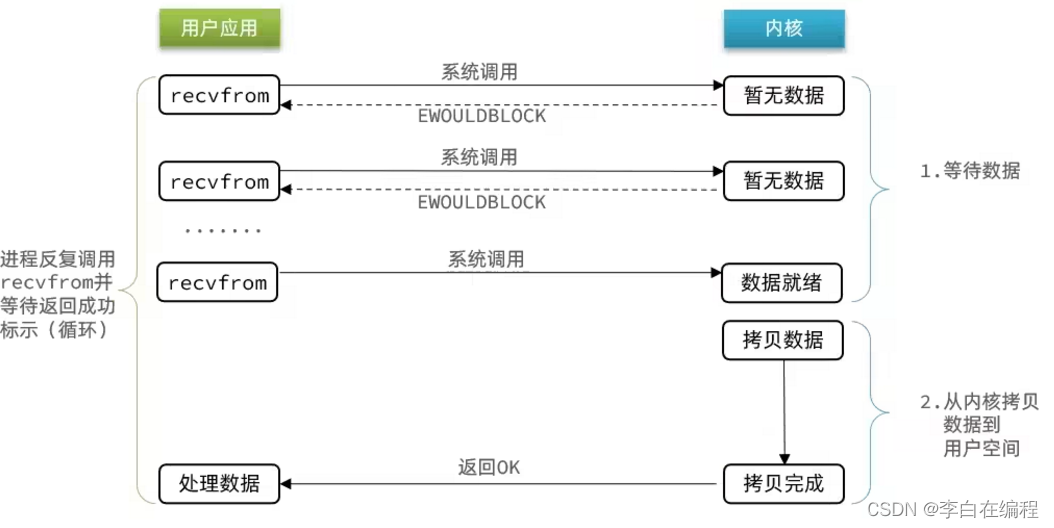
- 非阻塞IO的recvfrom操作会立即返回结果而不是阻塞用户进程,如果没有获取到数据,其后,会一直调用recvfrom来尝试获取数据。
阶段一(非阻塞状态):
- 用户进程尝试读取数据(比如网卡数据)
- 此时数据尚未到达,内核需要等待数据,返回异常给用户进程
- 用户进程拿到error后,再次尝试读取
- 循环往复,直到数据就绪
阶段二(阻塞状态):
- 将内核数据拷贝到用户缓冲区
- 拷贝过程中,用户进程依然阻塞等待
- 拷贝完成,用户进程解除阻塞,处理数据
- 可以看到,非阻塞IO模型中,用户进程在第一个阶段是非阻塞,第二个阶段是阻塞状态。虽然是非阻塞,但性能并没有得到提高。而且忙等机制会导致CPU空转,CPU使用率暴增。
4、网络模型之IO多路复用
在许多高性能的网络框架中,IO多路复用模型使用得比较常见(IO多路复用,复用的是单个线程)
无论是阻塞IO还是非阻塞IO,用户应用在一阶段都需要调用recvfrom来获取数据,差别在于无数据时的处理方案:
- 如果调用recvfrom时,恰好没有数据,阻塞IO会使CPU阻塞,非阻塞IO使CPU空转,都不能充分发挥CPU的作用。
- 如果调用recvfrom时,恰好有数据,则用户进程可以直接进入第二阶段,读取并处理数据
- 而在单线程情况下,只能依次处理IO事件,如果正在处理的IO事件恰好未就绪(数据不可读或不可写),线程就会被阻塞,所有IO事件都必须等待,性能自然会很差。
就比如服务员给顾客点餐,分两步:顾客思考要吃什么(等待数据就绪)、顾客想好了,开始点餐(读取数据)
要提高效率可以考虑的办法,方案一:增加更多服务员(多线程);方案二:不排队,谁想好了吃什么(数据就绪了),服务员就给谁点餐(用户应用就去读取数据)
那么问题来了:用户进程如何知道内核中数据是否就绪呢?- 这个问题的解决依赖于 文件描述符(File Descriptor)
文件描述符(File Descriptor):简称FD,是一个从0 开始的无符号整数,用来关联Linux中的一个文件。在Linux中,一切皆文件,例如常规文件、视频、硬件设备等,当然也包括网络套接字(Socket)。
通过FD,网络模型可以利用一个线程监听多个FD,并在某个FD可读、可写时得到通知,从而避免无效的等待,充分利用CPU资源。
阶段一:
- 用户进程调用select,指定要监听的FD集合和监听FD对应的多个socket
- 任意一个或多个socket数据就绪则返回readable(只要有一个顾客想要点餐,服务员就去服务)
- 此过程中用户进程阻塞
阶段二:
- 用户进程找到就绪的socket
- 依次调用recvfrom读取数据
- 内核将数据拷贝到用户空间,用户进程处理数据
当用户去读取数据的时候,会调用select函数,select函数会将需要监听的数据交给内核,由内核去检查这些数据是否就绪了,当数据就绪后会通知应用程序来读取数据,再从内核中把数据拷贝给用户态,完成数据处理,(保证去读取数据的时候,数据一定存在,避免CPU空转的情况),如果N多个FD一个都没处理完,此时就进行等待。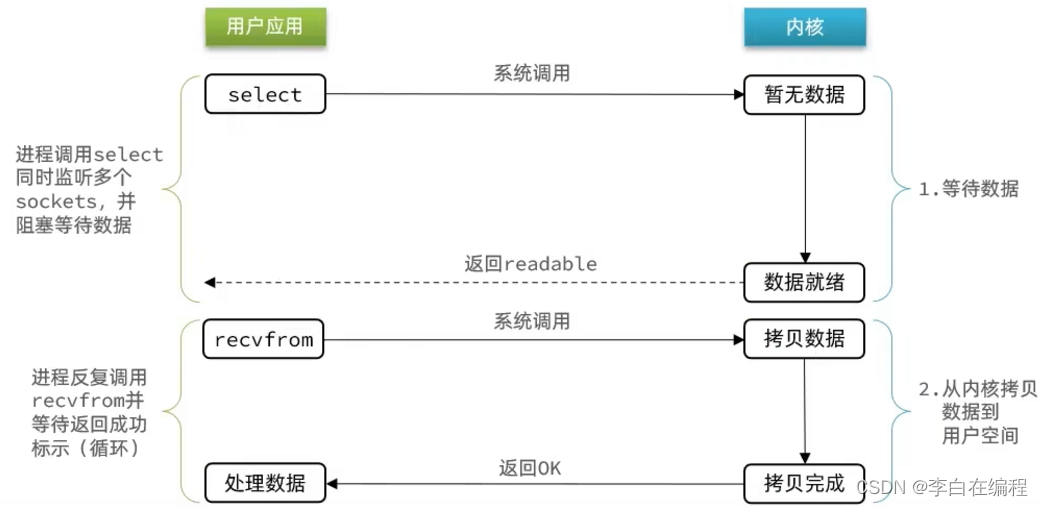
- 监听FD、通知的方式又有多种实现,常见的有:select、poll、epoll
- select和pool相当于是当被监听的数据准备好之后,把要监听的FD集合都发给你,你需要到FD集合中去遍历查找数据,故而,性能也并不是太好
- 而epoll,则是将内核的FD数据准备好了之后,会只把准备好的数据返回给用户应用,省去了遍历操作。
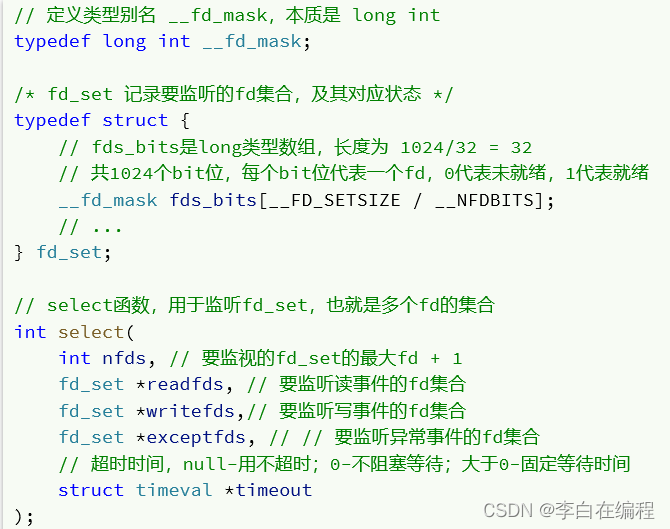
4.1、select模式
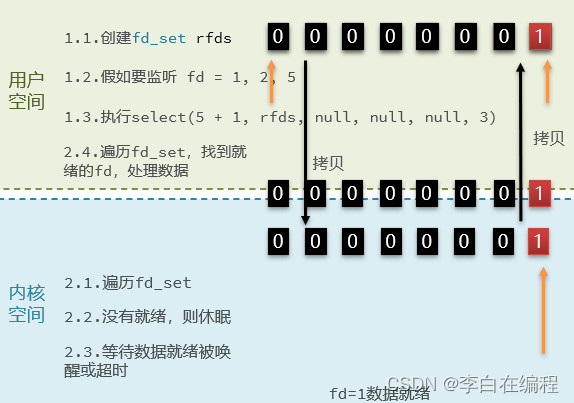
select是Linux最早是由的I/O多路复用技术,简单来说,就是用户应用把需要处理的数据封装成FD(文件描述符),然后在用户态时创建一个fd的集合(这个集合的大小是要监听的那个FD的最大值+1,但是集合长度是有限制的 ),同时在这个集合中,标明出来我们要控制哪些数据
假设监听数据是index为1,2,5的三项数据,此时会执行select函数,然后将整个fd发给内核态,内核态会去遍历用户态传递过来的数据,如果发现监听数据都没有就绪,就休眠,直到有数据准备好时才唤醒,唤醒后再次遍历,查找已经就绪的数据,最后再将这个FD集合写回到用户态中,此时用户态就知道有数据已准备就绪了,但是对于用户态而言,并不知道到底是哪些数据就绪,所以用户态也需要去遍历找到就绪数据的节点,再去发起读请求,这种模式尽管比阻塞IO和非阻塞IO好,但有要频繁地传递fd集合 和 遍历FD等问题。
Select模式存在的问题:
- 需要将整个fd_set从用户空间拷贝到内核空间,Select函数结束后,还需要再次拷贝回用户空间
- Select模式下,无法得知具体是哪个fd就绪,需要遍历整个fd_set(fd_set集合的结构以bit位的形式展现)
- fd_set监听的fd数量不能超过1024(fd_set的大小为1024bit),并行处理文件的数量(客户端请求量)只能是1024
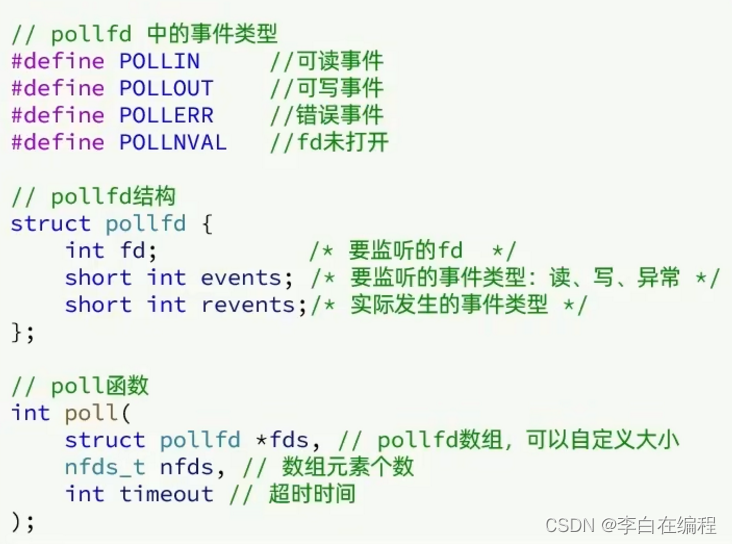
4.2、poll模式
- poll模式对select模式做了简单改进,但性能提升不明显,部分代码如下:
IO流程:
- 创建pollfd数组,向其中添加关注的fd信息,数组大小自定义
- 调用poll函数,将pollfd数组拷贝到内核空间,转链表存储,理论上无上限(但当fd数量过大时,会比较影响性能)
- 内核遍历fd集合,判断是否就绪
- 数据就绪或超时后,拷贝pollfd数组到用户空间,返回就绪fd数量n
- 用户进程判断n是否大于0,大于0则遍历pollfd数组,找到就绪的fd
与select对比:
- select模式中的fd_set大小固定为1024,而poll模式中的pollfd在内核中采用链表,理论上无上限(调用poll函数,将pollfd数组拷贝到内核空间,转为链表存储)
- 监听FD越多,每次遍历消耗时间也越久,性能反而会下降
4.3、epoll模式
- epoll模式是对select和poll的改进,它提供了三个函数:
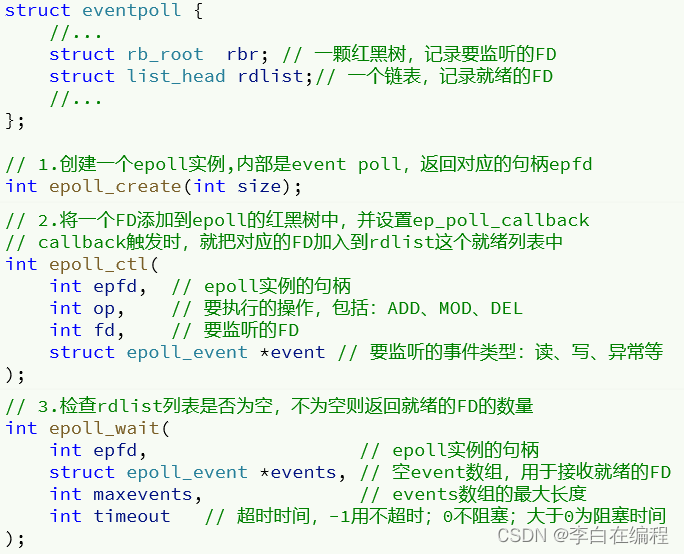
1)eventpoll
- 使用红黑树,记录要监听的FD,即 需要将监听的fd加入到红黑树中,为 struct rb_root rbr;
- 使用链表,记录就绪的FD,为 struct list_head rdlist;
2)epoll_ctl
- 调用epoll_ctl操作,将要监听的数据添加到红黑树上去,并且给每个fd设置一个监听函数,监听函数会在fd数据就绪时触发,即数据就绪了,其fd数据就会添加到list_head中去。
2)epoll_wait
- 在用户态创建一个空的events数组,当数据就绪之后,回调函数会把数据添加到list_head中去,当调用这个函数的时候,会去检查list_head,该过程需要参考配置的等待时间,可以等一定时间,也可以一直等, 如果在此过程中,检查到了list_head中有数据会将数据添加到链表中,此时将数据放入到events数组中,并且返回对应的操作的数量,此时,用户态收到响应后,从events中拿到对应准备好的数据的节点,再去调用方法去读取数据。
4.4、小总结:
select模式存在的问题:
- 能监听的FD最大不超过1024,即监听的FD数量有限
- 每次select都需要把所有要监听的FD都拷贝到内核空间,Select结束后,还需要将要监听的FD 拷贝到用户空间
- 每次都要遍历所有FD来判断就绪状态
poll模式的问题:
- poll利用链表解决了select中监听FD上限的问题,但依然要遍历所有FD,如果监听较多,性能会下降
- 当链表中的fd过多,遍历链表就会导致代价过大(可以监听的fd数量理论上无限,但会受限于性能)
epoll模式中如何解决这些问题的?
总结起来,需要解决监听FD数量有限、无法确切获取就绪状态的fd(需要遍历)、拷贝fd开销大
- 基于epoll实例中的红黑树保存要监听的FD,理论上无上限,而且增删改查效率都非常高
- 每个FD只需要执行一次epoll_ctl添加到红黑树,以后每次epol_wait无需传递任何参数,无需重复拷贝FD到内核空间
- eventpoll函数中定义了红黑树,来记录要监听的FD,定义了链表,来记录处于就绪状态的fd,当内核空间的链表中fd节点 拷贝到用户空间的event数组中,则用户空间中的fd都是处于就绪的fd
- 利用ep_poll_callback机制来监听FD状态,无需遍历所有FD,因此性能不会随监听的FD数量增多而下降
5、事件通知机制
当FD有数据可读时,我们调用epoll_wait(或者select、poll)可以得到通知。但是事件通知的模式有两种:
- LevelTriggered:简称LT,也叫做水平触发。只要某个FD中有数据可读,每次调用epoll_wait都会得到通知。
- EdgeTriggered:简称ET,也叫做边沿触发。只有在某个FD有状态变化时,调用epoll_wait才会被通知。
举个栗子:
- 1)假设一个客户端socket对应的FD已经注册到了epoll实例中
- 2)客户端socket发送了2kb的数据
- 3)服务端调用epoll_wait,得到通知说FD就绪
- 4)服务端从FD读取了1kb数据后,会再次调用epoll_wait,形成循环
结论
- 如果我们采用LT模式,因为FD中仍有1kb数据,则最后依然会返回结果,并且得到通知
- 如果我们采用ET模式,因为第③步已经消费了FD可读事件,最后FD状态没有变化,因此epoll_wait不会返回,数据无法读取,客户端响应超时。
- 使用ET模式,如果想要保证数据不丢失,则需要将对应的数据节点连接到list_head(记录就绪状态的链表)
总结:
- LT:事件通知频率较高,会有重复通知,影响性能,实现较简单
- ET:仅通知一次,效率高,可以基于非阻塞IO,循坏读取数据,从而解决数据读取不完整的问题; ET模式避免了LT模式可能出现的惊群现象;ET模式最好结合非阻塞IO读取FD数据,相比于LT会更加复杂
- select和poll模式仅仅支持LT模式,epoll可以自由选择LT和ET两种模式
6、基于epoll的服务器端流程
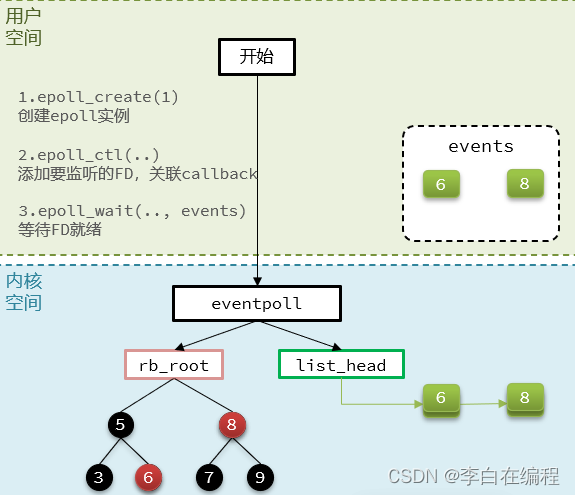
服务器启动以后,服务端会调用epoll_create,创建一个epoll实例,epoll实例中包含两个数据
- 红黑树(为空):rb_root 用来去记录需要被监听的FD
- 链表(为空):list_head,用来存放已经就绪的FD
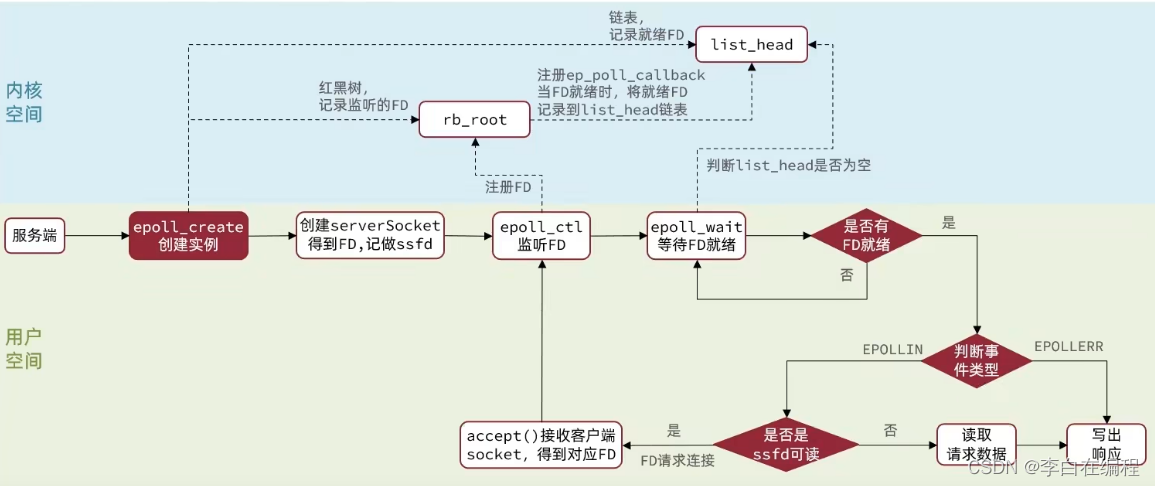
创建好epoll实例之后,会调用epoll_ctl函数,此函数会将需要监听的数据添加到rb_root(红黑树)中去,并且对当前这些存在于红黑树的节点设置回调函数,当这些被监听的数据一旦准备就绪,就会被调用,而调用的结果就是将红黑树的fd添加到list_head中去
调用epoll_wait函数,就会去校验是否有数据准备完毕(因为数据一旦准备就绪,就会被回调函数添加到list_head中),在等待了一段时间后(时间可以配置),如果超过了超时时间,则返回没有数据,如果有,则进一步判断当前是什么事件,如果是建立连接时间,则调用accept() 接受客户端socket,拿到建立连接的socket,然后建立起来连接,如果是其他事件,则把数据进行写出
7、其他网络模型
7.1、信号驱动IO
- 信号驱动IO是与内核建立SIGIO的信号关联 并设置回调,当内核有FD就绪时,会发出SIGIO信号通知用户,期间用户应用可以执行其它业务,无需阻塞等待。
阶段一:
- 用户进程调用sigaction,注册
信号处理函数 - 内核返回成功,开始监听FD
- 用户进程不阻塞等待,可以执行其它业务
- 当内核数据就绪后,回调用户进程的SIGIO处理函数
阶段二:
- 收到SIGIO回调信号
- 调用recvfrom,读取
- 内核将数据拷贝到用户空间
- 用户进程处理数据
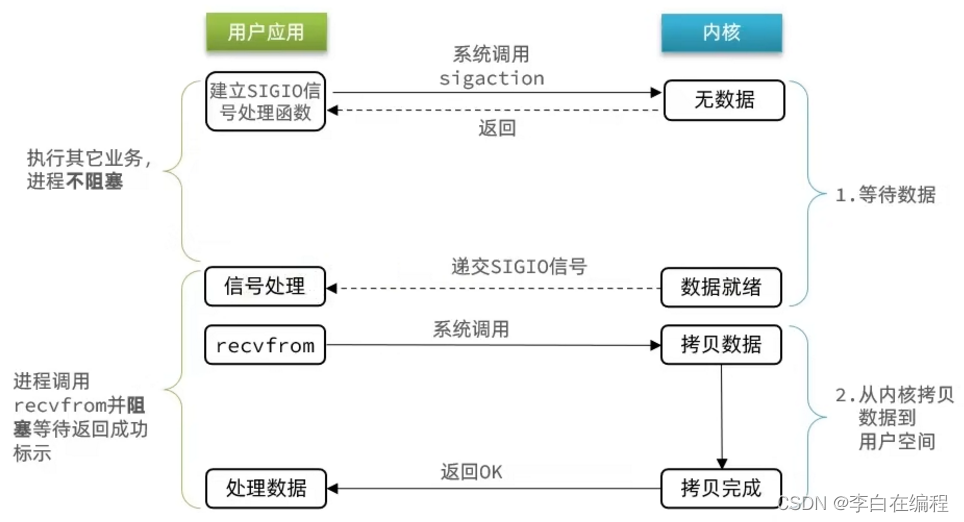
- 当有大量IO操作时,信号较多,SIGIO处理函数不能及时处理可能导致信号队列溢出,而且内核空间与用户空间的频繁信号交互性能也较低。
7.2、异步IO
- 异步IO,不仅仅是用户态在试图读取数据时不阻塞,而且当内核的数据准备完成后,也不会阻塞
- 由内核将所有数据处理完成后,将数据写入到用户态中,然后才算完成,所以性能极高,不会有任何阻塞,全部都由内核完成,可以看到,异步IO模型中,用户进程在两个阶段都是非阻塞状态。

7.3、同步和异步的对比
- IO操作是同步还是异步,关键是看数据在内核空间和用户空间的拷贝过程(数据读写的IO操作),也就是阶段二是同步还是异步
- 阶段1:等待数据就绪
- 阶段2:将数据从内核空间拷贝到用户空间(阻塞就是同步I/O,非阻塞就是异步I/O)
8、Redis的网络模型
8.1、Redis是单线程?为什么使用单线程
Redis到底是单线程还是多线程,需要具体场景具体分析,简而言之:
- 如果仅仅聊Redis的核心业务部分(命令处理),答案是单线程
- 如果是聊整个Redis,那就是多线程
在Redis版本迭代过程中,在两个重要的时间节点上引入了多线程的支持:
- Redis v4.0:引入多线程来异步处理一些耗时较久的任务,例如异步删除命令unlink
- Redis v6.0:在核心网络模型中引入 多线程,进一步提高对于多核CPU的利用率
因此,对于Redis的核心网络模型,在Redis 6.0之前确实都是单线程,是利用epoll(Linux系统)这样的IO多路复用技术在事件循环中不断处理客户端请求。
8.2、为什么Redis要选择单线程
- Redis是纯内存操作,执行速度非常快,其性能瓶颈是网络延迟而不是执行速度,因此,多线程并不会带来巨大的性能提升
- 多线程会导致过多的上下文切换,带来不必要的开销
- 引入多线程会面临线程安全的问题,如要解决,还要引入线程锁之类的安全手段,会导致实现复杂度高,性能降低
8.3、Redis网络模型详解
- Redis通过IO多路复用来提高网络性能,并且支持各种不同的多路复用实现,以及封装实现,提供了统一的高性能事件库API库 AE:
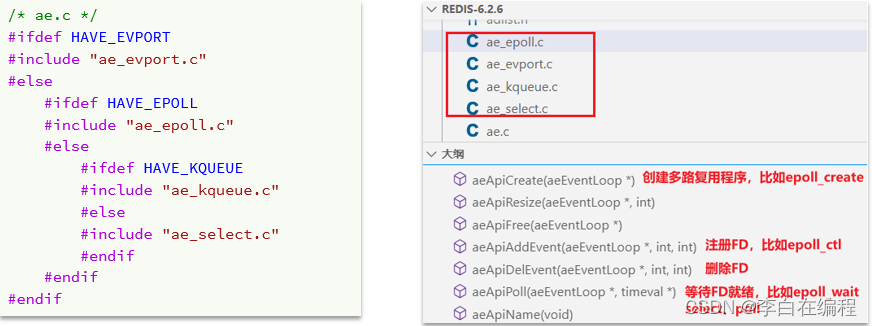
- Redis6.0中引入了多线程,其目的是为了提高IO读写速率,因此,在解析客户端命令,写响应结果(即将请求数据写入缓冲区、解析缓冲区数据将其转化为Redis命令)时,采用了多线程,而核心的业务,如命令执行、IO多路复用模块依然是由主线程执行
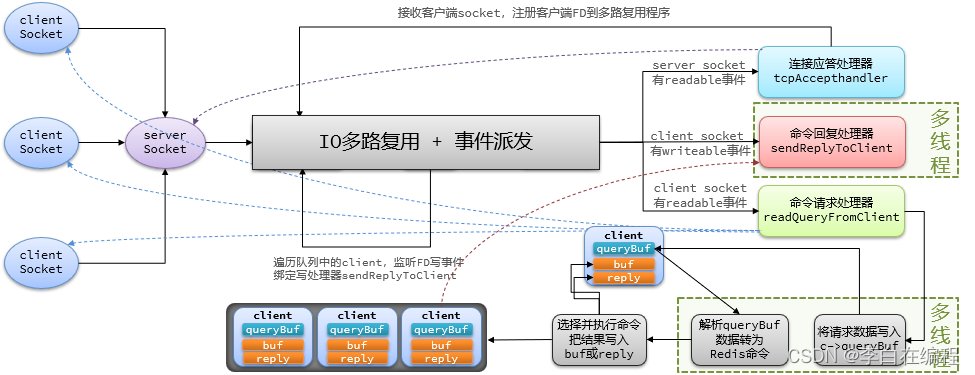
8.4、Redis 多线程网络模型的设计方案
- 使用 I/O 线程实现网络 I/O 多线程化,I/O 线程只负责网络 I/O 和命令解析,不执行客户端命令。
- 利用原子操作+交错访问实现无锁的多线程模型。
- 通过设置 CPU 亲和性,隔离主进程和其他子进程,让多线程网络模型能发挥最大的性能。
9、结语
引自:https://zhuanlan.zhihu.com/p/356059845
Redis 自 2009 年发布第一版之后,其单线程网络模型的选择在社区中从未停止过讨论,多年来一直有呼声希望 Redis 能引入多线程从而利用多核优势,但是作者 antirez 是一个追求大道至简的开发者,对 Redis 加入任何新功能都异常谨慎,所以在 Redis 初版发布的十年后才最终将 Redis 的核心网络模型改造成多线程模式,这期间甚至诞生了一些 Redis 多线程的替代项目。虽然 antirez 一直在推迟多线程的方案,但却从未停止思考多线程的可行性,Redis 多线程网络模型的改造不是一朝一夕的事情,这其中牵扯到项目的方方面面,所以我们可以看到 Redis 的最终方案也并不完美,没有采用主流的多线程模式设计。
参考资料:
- https://zhuanlan.zhihu.com/p/356059845
- 黑马Redis实战教程
- 极客时间Redis核心技术与实战