0. 楔子
之所以写这篇文章,是之前在调研文献的过程中,经常会遇到关于旋转的概念,公式等,比如旋转矩阵、轴-角表示(axis-angle representation)、四元数、李群、李代数等等。
在调研过程中,我深深地感到,目前缺乏对上述这些内容的一些友好、直观的introduction。我本人不是搞数学的,甚至数学还相当菜,但我还是感觉research,re-search,其实就是sort things out & make things simple。所以想在这里总结一些内容,有不对的,希望大家能帮忙指出,至少我们可以把这些概念搞清楚。
那么在正式开始之前,我们先过一些基本的概念,这些概念后续会直接使用,不会再提及。
设我们有两个向量
那么两个向量的叉积,是另外一个新的向量。
OK,实际上如果我们把上面的辅助变量i, j, k去掉的话,那么叉积可以定义为:
这里介绍一种后面经常用到的数学工具,叫作反对称矩阵算子(skew-symetric operator),有多种记法,我们统一记作
什么意思呢?就是说给你一个向量
如果我们再仔细看一下上面叉乘的定义就会明白这个算子的深意了:
用这个算子,可以将不直观、不好算的向量叉乘,转化为,直观、好算的矩阵乘法。
1. 说说旋转矩阵
说起旋转矩阵,大家都太熟了,简单,旋转矩阵肯定是正交阵,
只能说,性质也太好了吧。
这边搬运一下《视觉SLAM十四讲》里面关于旋转矩阵导出的一段描述,个人认为是旋转矩阵最简单直观的导出。
首先设在三维空间里面,我们有一个最常用的标准正交基
那么假设有一个向量
OK,那么假如说,
根据书上写的,我们有:
如果这个时候我们左边乘以一个
因为是标准正交基对吧,所以有:
也就是咱们熟悉的:
顺着这个思路,刚刚的正交性质啊,行列式性质啊,其实都十分直观。给我的感觉,就是旋转矩阵,其实就是两个标准正交基的一个外积。因为本身标准正交基就具有十分好的性质,所以呢,旋转矩阵具有良好性质,本身也是一件合情合理的事情了。
2. Rodrigues' formula
主要是搬运维基百科的一点东西,这公式很重要,需要总结一下。
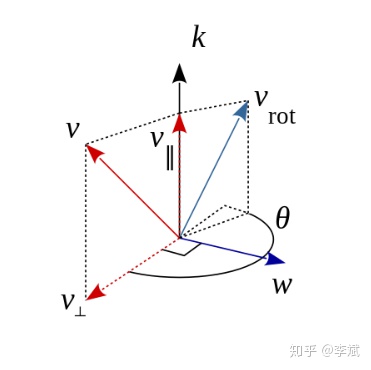
OK,还是先说设定我们有一个向量
首先对向量
看一下图,再看一下红色部分,
好了,下面的就是平行分量不转,垂直分量转
准备工作基本做好了,我们现在可以得到第一版本,向量点积叉积版的罗格里格斯公式:
OK,目前看起来一切都好,不过叉积还不太好算,我们利用之前介绍的反对称算子
再往前走一步:
那么我们重新推导第二版,反对称算子版本,也就是矩阵乘法版本的罗德里格斯公式:
又因为:
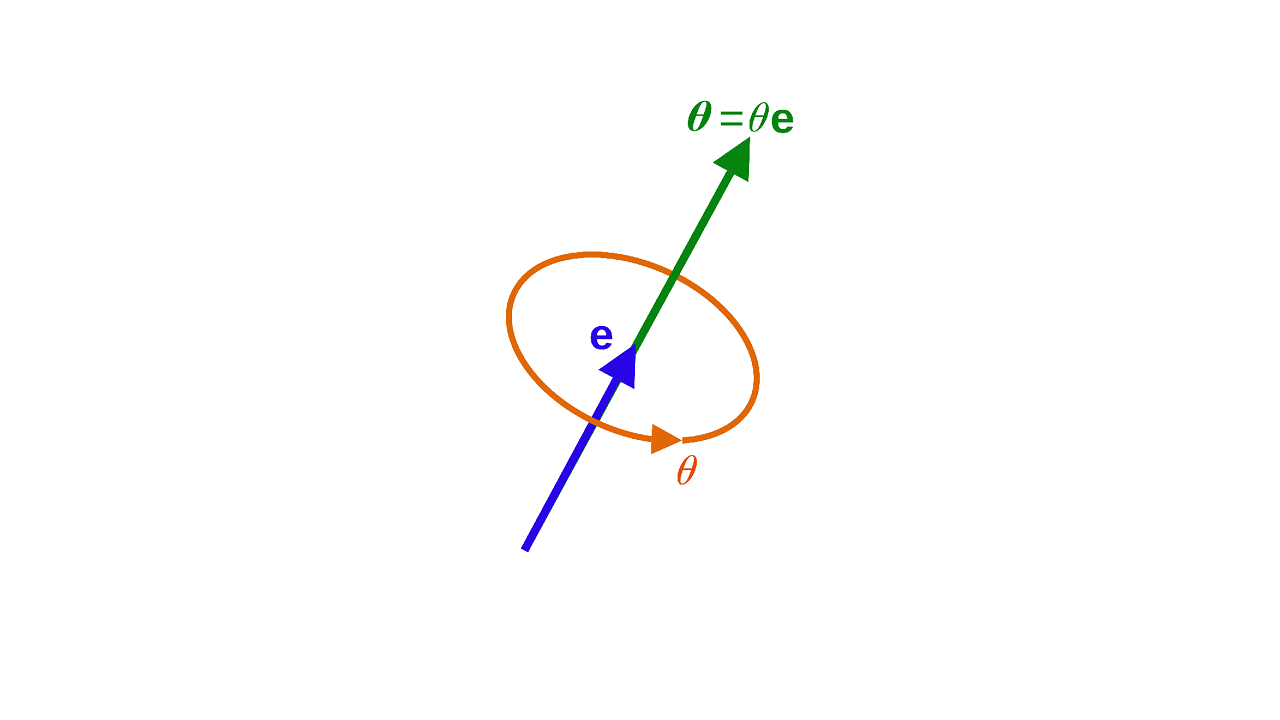
这也是我们最常见到的Rodrigues公式的版本,这里面还藏着个玄机,其实就是罗德里格斯公式就是轴-角表示法(axis-angle)和旋转矩阵的一个转换。当然也可以看成是
第一篇先写到这儿吧。