2021SC@SDUSC
本篇博客讲述一些关于模块反演的内容,参考Daniel J.Bernstein和Bo Yin Yang的论文“快速恒定时间gcd计算和模块反演”
目录
快速恒定时间gcd计算和模块反演
使用除法步骤计算最大公约数(GCD)
它计算奇数整数f和任意整数g的最大公约数。它的内部循环不断重写变量f和g以及状态变量δ从1开始,直到达到g=0。在这一点上,f给出了GCD。循环中的每个转换称为“分割步骤”(在下文中称为divstep)。
例如,gcd(21,14)的计算公式为:
-起始状态&delta=1 f=21 g=14
-以第三个分支&delta=2 f=21 g=7
-以第一个分支为例:&delta=-1 f=7 g=-7
-以第二个分支&delta=0 f=7 g=0
-答案| f |=7。
工作原理:
Divsteps可以分解为两个步骤
(a) 如果g是奇数,用(g,g-f)或(f,g+f)替换(f,g),得到偶数g。
(b) 将(f,g)替换为(f,g/2)(其中g保证为偶数)。
这两项操作都不会改变GCD:
对于(a),假设gcd(f,g)=c,那么f=a c和g=b c表示一些整数a和b。当(g,g-f)=(b c,(b-a)c)和(f,f+g)=(a c,(a+b)c)时,结果显然仍然有公因子c。另一方面的推理表明,这样做也不能增加任何共同因素。
对于(b),我们知道f是奇数,所以gcd(f,g)显然没有因子2,我们可以从g中去掉它。
该算法最终将收敛到g=0。由此我们最终找到了一个最终值f’,其gcd(f,G)=gcd(f’,0)。作为f’和0的gcd定义为
| f’|,这就是我们的答案。
&delta参数对于引导算法缩小数字的大小是必要的,而无需明确查看高阶位。
以后将变得重要的属性:
执行超过需要的步骤不是问题,因为在g=0之后f不再改变。
只有偶数被2除。这意味着,当用代数方法进行推理时,我们不需要担心舍入问题。
在算法执行过程中的每一点上,接下来的N个步骤仅取决于f和g的底部N位以及&delta。
以下使用python实现的代码部分: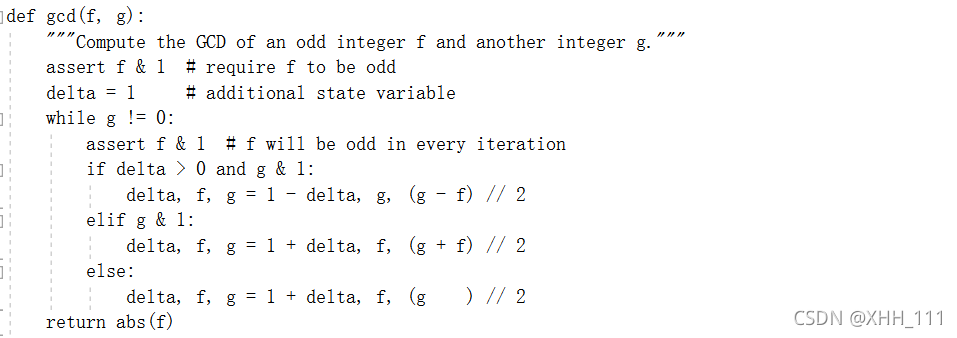
从GCDs到模逆
我们需要一个算法来计算模M的x的逆a,即a的个数,使得a&thinsp;x=1 mod M。仅当x和M的GCD为1时,此逆函数才存在,但当M为素数且0<x<M时,情况总是如此,假设存在模逆。结果表明,通过跟踪内部变量如何在每一步写入输入的线性组合,可以计算出该逆作为计算GCD的副作用(参见[扩展欧几里德算法])
由于GCD为1,这样的算法将计算数字a和b,使得a&thinsp;x+b&thinsp;M=1。取该表达式mod M表示&thinsp;x mod M=1,我们看到a是x mod M的模逆。
如果模M为奇数,则可使用上述基于分步的GCD算法计算模逆。为此,计算gcd(f=M,g=x),同时跟踪额外的变量d和e,每个步骤d=f/x(mod M)和e=g/x(mod M)。
这里的f/x表示与x相乘得到f模M的数字,因为f和g被初始化为M和x分别,d和e刚开始是0(M/x modm=0/x modm=0)和1(x/xmodm=1)。
还请注意,在整个计算过程中跟踪d和e以确定反演的方法与本文不同。这里确定了整个计算的转移矩阵,并由此计算出逆矩阵。这里的方法避免了各种大小的2x2矩阵乘法的需要,并且在我们能够在C中进行的优化级别上似乎更快。
实现代码: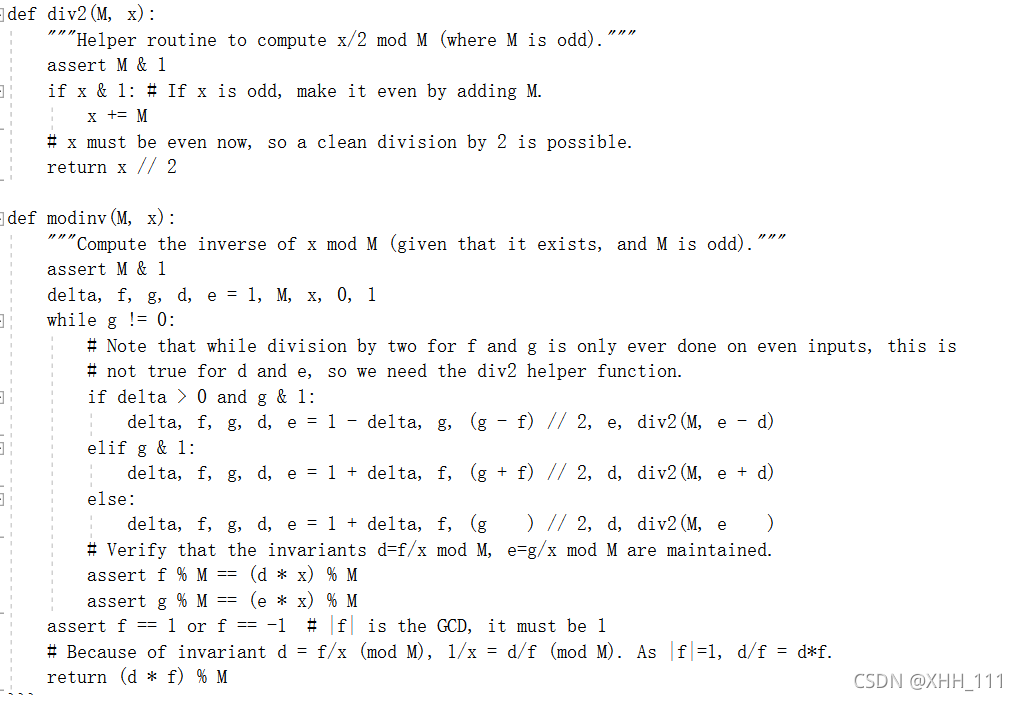
分批处理
每一步都可以表示为矩阵乘法,将转移矩阵(1/2t)应用于向量[f,g]和[d,e]
t = [ u, v ]
[ q, r ]
[ out_f ] = (1/2 * t) * [ in_f ]
[ out_g ] = [ in_g ]
[ out_d ] = (1/2 * t) * [ in_d ] (mod M)
[ out_e ] [ in_e ]
其中(u,v,q,r)是(0,2,-1,1),(2,0,1,1)或(2,0,0,1),取决于采用哪个分支。如上所述,结果f和g始终是整数。执行多个除法步骤对应于与所有结果的乘积相乘。单个步骤的转移矩阵。由于每个转移矩阵由整数除以2组成,这些矩阵的乘积将由整数除以2^N组成。更新d和e时,这些分割代价很高,因此我们延迟它们:我们计算按2 ^N缩放的组合转移矩阵的整系数,并且最后一步,按2N进行一次除法:
实现代码: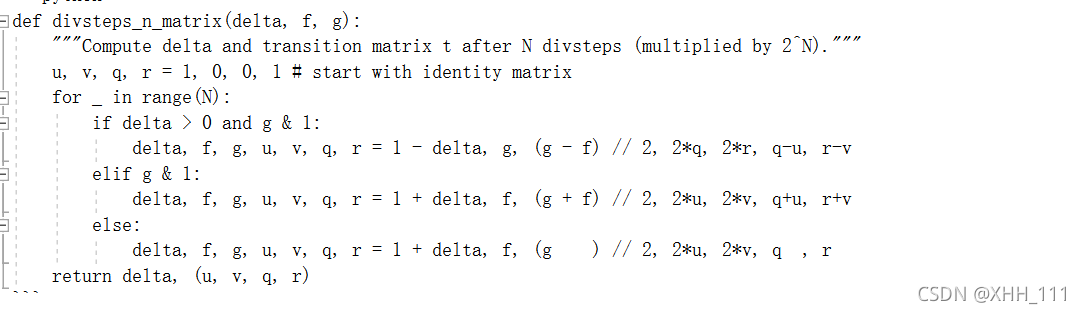 由于divstep中的分支完全由f和g的底部N位决定,因此计算转移矩阵的函数只需要查看这些底部位。此外,所有中间结果和输出都符合(N+1)位数字(f和g为无符号;u、v为有符号,q、 和r)这意味着使用64位整数可以设置N=62,一次计算62步的完整转移矩阵,而不需要任何大整数运算。这就是该算法高效的原因:它只需要每N步更新一次完整大小的f、g、d和e数。我们仍然需要函数来计算:
由于divstep中的分支完全由f和g的底部N位决定,因此计算转移矩阵的函数只需要查看这些底部位。此外,所有中间结果和输出都符合(N+1)位数字(f和g为无符号;u、v为有符号,q、 和r)这意味着使用64位整数可以设置N=62,一次计算62步的完整转移矩阵,而不需要任何大整数运算。这就是该算法高效的原因:它只需要每N步更新一次完整大小的f、g、d和e数。我们仍然需要函数来计算:
[ out_f ] = (1/2^N * [ u, v ]) * [ in_f ]
[ out_g ] ( [ q, r ]) [ in_g ]
[ out_d ] = (1/2^N * [ u, v ]) * [ in_d ] (mod M)
[ out_e ] ( [ q, r ]) [ in_e ]
因为divsteps变换只将偶数除以2,所以t&thinsp;[f,g]总是相等的。当t是N个divsteps的组合时,由此得出的f和g将是2^N的倍数,被2N除就是简单地将它们下移:
实现代码: 对于d和e,情况并非如此,我们需要一个“div2”函数的等价物来除以2^N mod M。如果我们预先计算了1/M mod 2 ^ N(它总是存在于奇数M中)
对于d和e,情况并非如此,我们需要一个“div2”函数的等价物来除以2^N mod M。如果我们预先计算了1/M mod 2 ^ N(它总是存在于奇数M中)
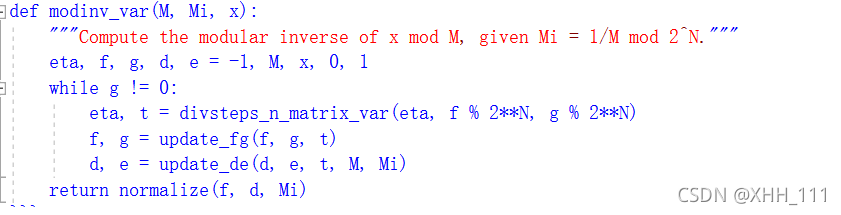
代码实现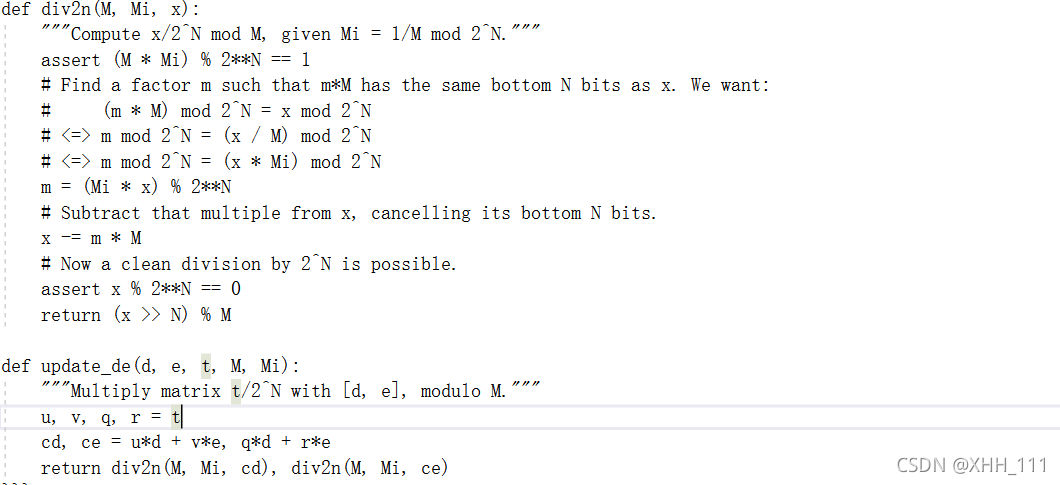 有了所有这些,我们可以编写一个版本的’modinv’,一次执行N个步骤:
有了所有这些,我们可以编写一个版本的’modinv’,一次执行N个步骤: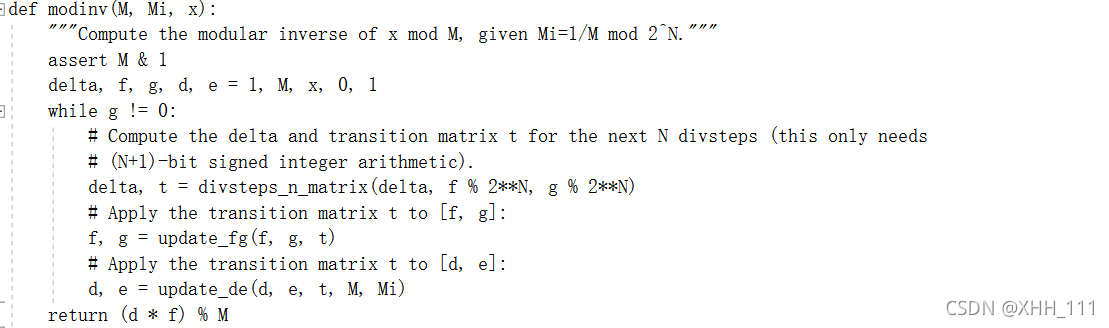 这意味着在实践中,我们将始终执行N个步骤的倍数。这不是问题,因为一旦g=0,进一步的除法步骤就不再影响f、g、d或e(只有&delta不断增加)。对于可变时间代码,这些多余的迭代将在后面的章节中进行优化。
这意味着在实践中,我们将始终执行N个步骤的倍数。这不是问题,因为一旦g=0,进一步的除法步骤就不再影响f、g、d或e(只有&delta不断增加)。对于可变时间代码,这些多余的迭代将在后面的章节中进行优化。
避免模运算
到目前为止,我们在两个地方计算模M的大数的余数:在每个“update_de”中的“div2n”的末尾,以及在“modinv”的最末尾,由于f的符号可能会对d求反。一般来说,这些操作都是相对昂贵的。要处理’div2n’中的模运算,我们只需停止要求d和e始终在[0,M)范围内。让我们从将’div2n’内联到’update_de’开始,并删除模最后的操作: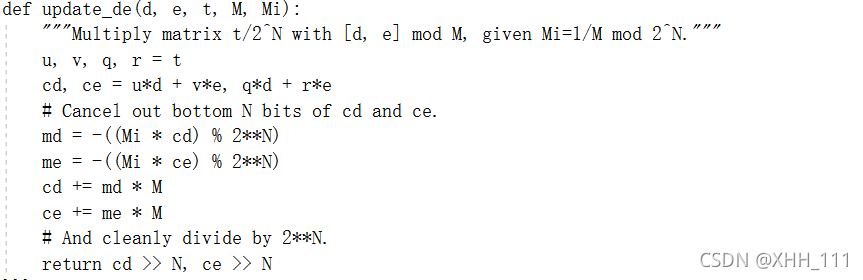 让我们看看这些数字范围的界限。可以证明| u |+| v |和| q |+| r |永远不会超过2N,因此与t相乘的输出的绝对值最多是最大绝对输入值的2N倍。如果输入d和e在(-M,M)中,这对于初始值d=0和e=1(假设M>1)来说肯定是正确的,乘法的结果是范围内的数字减去小于2N乘以M以抵消N位,使之达到(-2^ N+1^ M,2 ^ N^M),最后除以2N即为(-2M,M)“update_de”的另一个应用程序将采用这种方式.到(-3M,2M),以此类推。变量范围的逐步扩展可以通过在变量为负值时将d和e增加M来抵消:
让我们看看这些数字范围的界限。可以证明| u |+| v |和| q |+| r |永远不会超过2N,因此与t相乘的输出的绝对值最多是最大绝对输入值的2N倍。如果输入d和e在(-M,M)中,这对于初始值d=0和e=1(假设M>1)来说肯定是正确的,乘法的结果是范围内的数字减去小于2N乘以M以抵消N位,使之达到(-2^ N+1^ M,2 ^ N^M),最后除以2N即为(-2M,M)“update_de”的另一个应用程序将采用这种方式.到(-3M,2M),以此类推。变量范围的逐步扩展可以通过在变量为负值时将d和e增加M来抵消: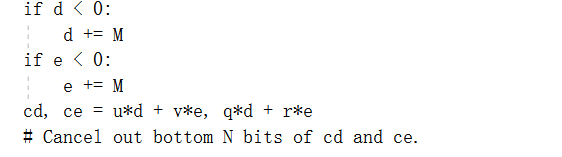 当输入为(-2M,M)时,它们将首先被移入范围(-M,M),这意味着输出将再次为(-2M,M),无论有多少次“update_de”调用,情况仍然如此。在下面的内容中,我们将尝试使其更有效;q&thinsp的M和ce;M.同样地,将e增加M等于将cd增加v&thinsp;r&thinsp的M和ce;M.所以我们可以写:
当输入为(-2M,M)时,它们将首先被移入范围(-M,M),这意味着输出将再次为(-2M,M),无论有多少次“update_de”调用,情况仍然如此。在下面的内容中,我们将尝试使其更有效;q&thinsp的M和ce;M.同样地,将e增加M等于将cd增加v&thinsp;r&thinsp的M和ce;M.所以我们可以写: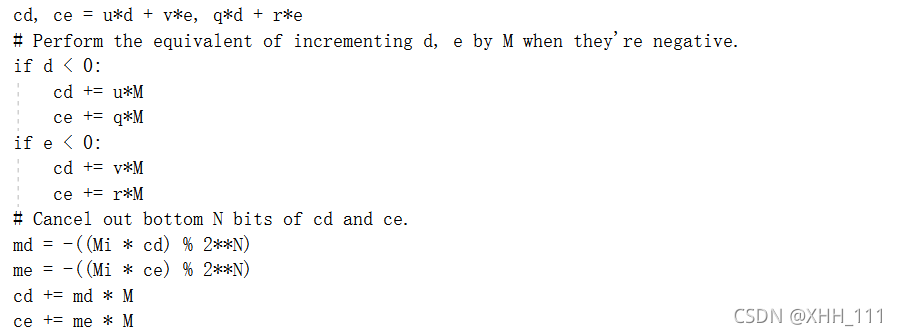 现在请注意,我们有两个步骤对cd和ce进行修正,它们将M的倍数相加:这个增量,和抵消底部位的减量。第二个取决于第一个,但它们仍然可以通过只计算cd和ce的底部位来有效组合。首先,使用它们来计算最终的md,me值:
现在请注意,我们有两个步骤对cd和ce进行修正,它们将M的倍数相加:这个增量,和抵消底部位的减量。第二个取决于第一个,但它们仍然可以通过只计算cd和ce的底部位来有效组合。首先,使用它们来计算最终的md,me值: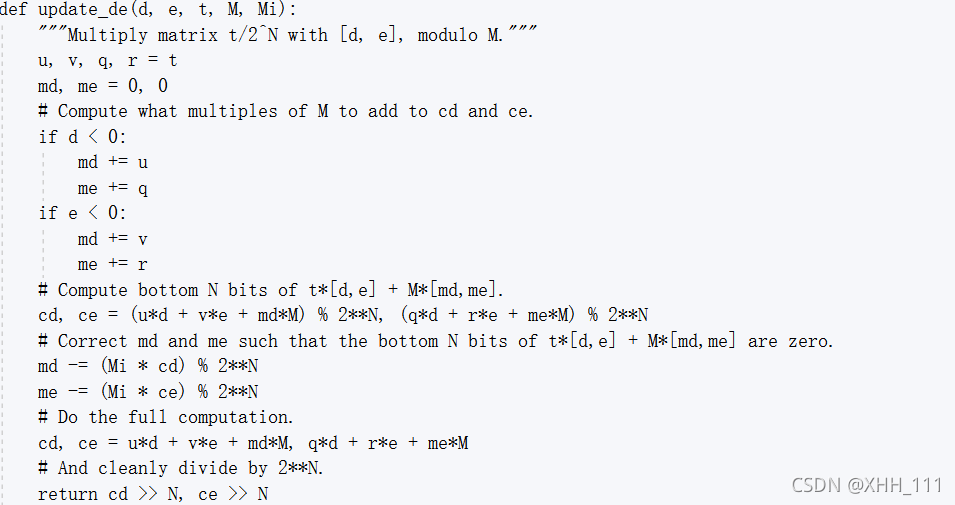
最后一个优化:我们可以避免md&thinsp;M和我&thinsp;在cd的底部位进行M次乘法和ce,将其移动到md和me校正: 结果函数将(-2M,M)范围内的d和e作为输入,并输出相同范围内的值。这也意味着’modinv’末尾的d值将在该范围内,而我们希望得到[0,M]中的结果。为此,我们需要一个规范化函数。很容易将d的条件求反(基于f的符号)也集成到其中:
结果函数将(-2M,M)范围内的d和e作为输入,并输出相同范围内的值。这也意味着’modinv’末尾的d值将在该范围内,而我们希望得到[0,M]中的结果。为此,我们需要一个规范化函数。很容易将d的条件求反(基于f的符号)也集成到其中:
定时操作
该算法的主要卖点是快速恒定时间运算。还有什么代码流取决于目前为止的输入数据?
-while g&ne的迭代次数
-modinv’中的0循环
-divsteps_n_matrix的分支
-该标志签入update_de
-该符号签入“normalize”`
要使“modinv”中的while循环保持恒定时间,可以将其替换为恒定数量的迭代。
为了处理’divsteps\u n_matrix’中的分支,我们将用常量时间按位替换它们操作(希望C编译器不够聪明,无法将它们转换回分支;请参阅valgrind_ctime_test.c用于自动测试,但事实并非如此)。
代码实现: 为了将上述操作转换为按位操作,我们依赖一个条件求反的技巧:根据2的补码中负数的定义,(-v==~v+1)对每个数字v都有效。由于2的补码中的-1都是1位,所以位翻转可以用-1表示为异或。因此-v==(v^ -1)-(1)。因此,如果我们有一个值为0或-1的变量c,那么(v^c)-c在c=0时为v,在c=-1时为-v。
为了将上述操作转换为按位操作,我们依赖一个条件求反的技巧:根据2的补码中负数的定义,(-v==~v+1)对每个数字v都有效。由于2的补码中的-1都是1位,所以位翻转可以用-1表示为异或。因此-v==(v^ -1)-(1)。因此,如果我们有一个值为0或-1的变量c,那么(v^c)-c在c=0时为v,在c=-1时为-v。![]() 以恒定时间形式,如下所示:
以恒定时间形式,如下所示: 为了使用这个技巧,我们需要一个助手掩码变量c1来解析条件&delta>0到-1(如果为真)或0(如果为假)。我们使用右移计算c1,这相当于除以指定的2的幂并向下舍入。因此,右移63将[-2^ 63,0)范围内的所有数字映射为-1,将[0,2^63)范围内的数字映射为0。利用x&0=0和x&(-1)=x的事实(再次在两个补码系统上),我们可以写出:
为了使用这个技巧,我们需要一个助手掩码变量c1来解析条件&delta>0到-1(如果为真)或0(如果为假)。我们使用右移计算c1,这相当于除以指定的2的幂并向下舍入。因此,右移63将[-2^ 63,0)范围内的所有数字映射为-1,将[0,2^63)范围内的数字映射为0。利用x&0=0和x&(-1)=x的事实(再次在两个补码系统上),我们可以写出:

再次使用条件否定技巧,我们可以写:
最终
![]()
事实证明,通过应用替换&eta=-&希腊字母表的第4个字母在这种表述中,否定&delta;对应于否定&eta;,和增量&delta;对应于递减&eta;。这允许我们在c1计算中删除否定: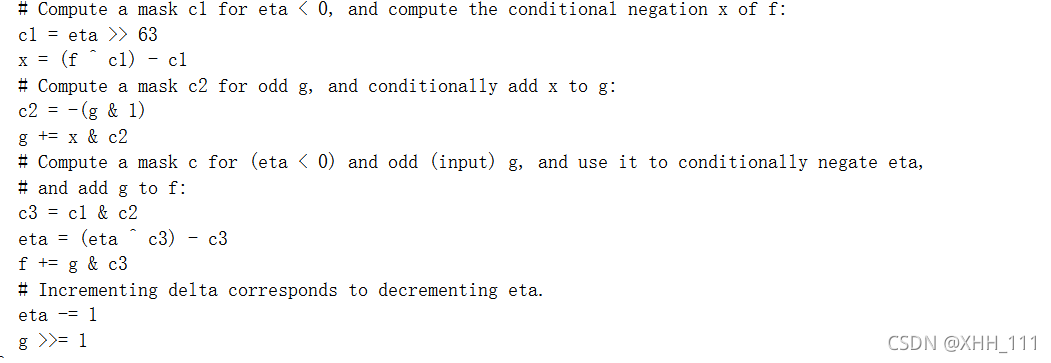 可以使用最坏情况下性能更好的divsteps变体:starting&delta;1/2而不是1。这将256位输入的最坏情况迭代次数减少到590次(可使用凸包分析显示)。在这种情况下,替换&zeta=-(&delta;+1/2)用于保持变量为整数。增量&增量;到1仍然转化为递减&zeta;由1,但否定&delta;现在对应于从&zeta;到-(&zeta;+1)或~&zeta;。基于c3有条件地这样做很简单:
可以使用最坏情况下性能更好的divsteps变体:starting&delta;1/2而不是1。这将256位输入的最坏情况迭代次数减少到590次(可使用凸包分析显示)。在这种情况下,替换&zeta=-(&delta;+1/2)用于保持变量为整数。增量&增量;到1仍然转化为递减&zeta;由1,但否定&delta;现在对应于从&zeta;到-(&zeta;+1)或~&zeta;。基于c3有条件地这样做很简单: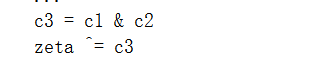
通过将“divsteps\u n_矩阵”中的循环替换为上述divstep代码的一个变体(扩展为也将所有f运算应用于u、v,将所有g运算应用于q、r),获得了“divsteps\u n_矩阵”的恒定时间版本。完整的代码将在第7节中介绍。这些位篡改技巧也可用于在update_de和’normalize`恒定时间。
可变时间优化
构建一个更快的非恒定时间’divsteps\n\u matrix’函数。
要做到这一点,首先要考虑编写DIVIDEA操作的内部循环的另一种方法。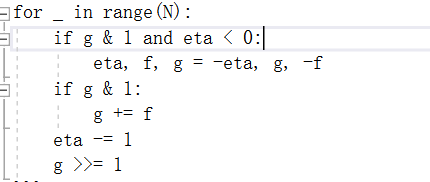 每当g为偶数时,循环仅向下移动g并减小&eta;。当g以多个零位结束时,这些迭代可以合并为一个步骤。这需要有效地计算底部零位,这在大多数平台上都是可能的;它在这里被抽象为函数“count\u training\u zeros”。
每当g为偶数时,循环仅向下移动g并减小&eta;。当g以多个零位结束时,这些迭代可以合并为一个步骤。这需要有效地计算底部零位,这在大多数平台上都是可能的;它在这里被抽象为函数“count\u training\u zeros”。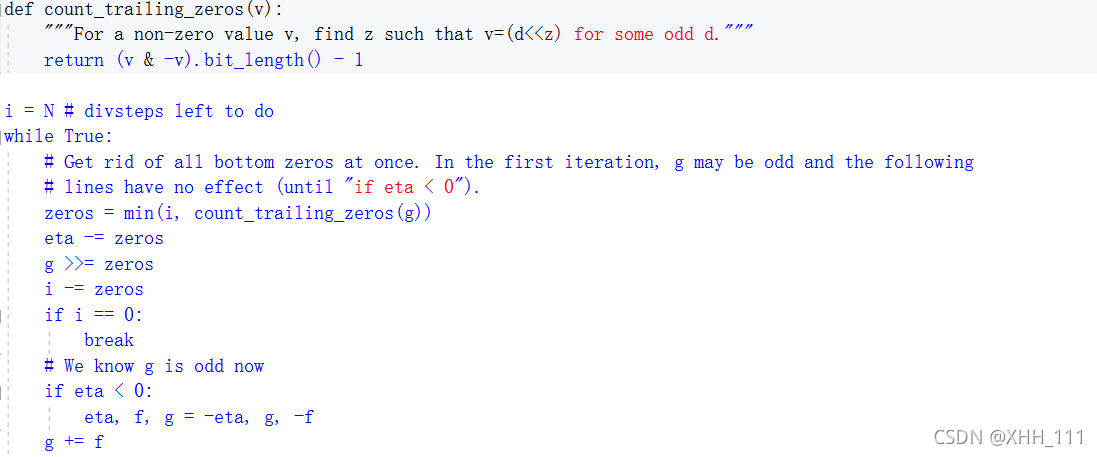 现在我们可以一次从g中删除多个底部0位,但只要有底部1位,就仍然需要一次完整的迭代。在下面的内容中,我们还将同时删除多个1位。
现在我们可以一次从g中删除多个底部0位,但只要有底部1位,就仍然需要一次完整的迭代。在下面的内容中,我们还将同时删除多个1位。
请注意,只要&eta&geq;0时,循环不会修改f。相反,它取消了的底部位并将其移出,并减少&eta;因此,我只在&eta;变为负值,或者当我达到0时。结合起来,这相当于将f和g的倍数相加以抵消多个底部位,然后将它们移出。
很容易找到这个倍数是什么:我们想要一个数字w,这样g+w&thinsp;f有几个底部零位。如果这个位数是L,我们需要g+w&thinsp;f mod 2^L=0,或w=-g/f mod 2^L。由于f是奇数,任何L都存在这样的w。L不能超过i步(正如我们之前完成的循环)或超过&eta+1个步骤(正如我们在那一点上运行’eta,f,g=-eta,g,f’),但除此之外,我们只受到计算复杂性的限制。
此代码演示如何取消每个步骤最多4位: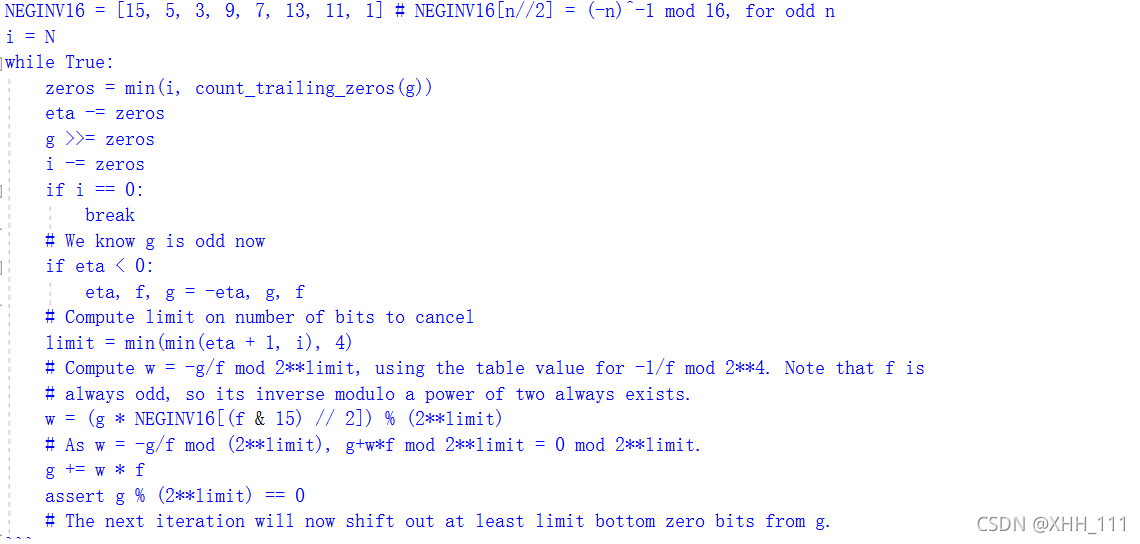 通过使用更大的表,可以一次取消更多的位。该表也可以实现作为一个公式。已知计算两个的模幂的模逆的几个公式;
通过使用更大的表,可以一次取消更多的位。该表也可以实现作为一个公式。已知计算两个的模幂的模逆的几个公式;
这里我们需要求反模逆,它是这些的简单变换:
代替3位表:-f或f^6
代替4位表:1-f(f+1)
对于较大的表格,可以使用以下技术:
如果w=-1/f模2^L,则w(w&thinsp;f+2)为
-1/f模块2 ^ 2。这允许扩展以前的公式(或表格)。特别是我们有这个6位函数(基于上面的3位函数):f(f^2-2)这个循环,再次扩展到处理u、v、q和r以及f和g,放在“divsteps\u n\u matrix”中,给出了一个更快但非恒定时间的版本。
最终版本:
一种在恒定时间内计算转移矩阵的方法,使用“divsteps\u n_matrix”函数,但其循环替换为恒定时间divstep的变体,扩展为处理u、v、q、r: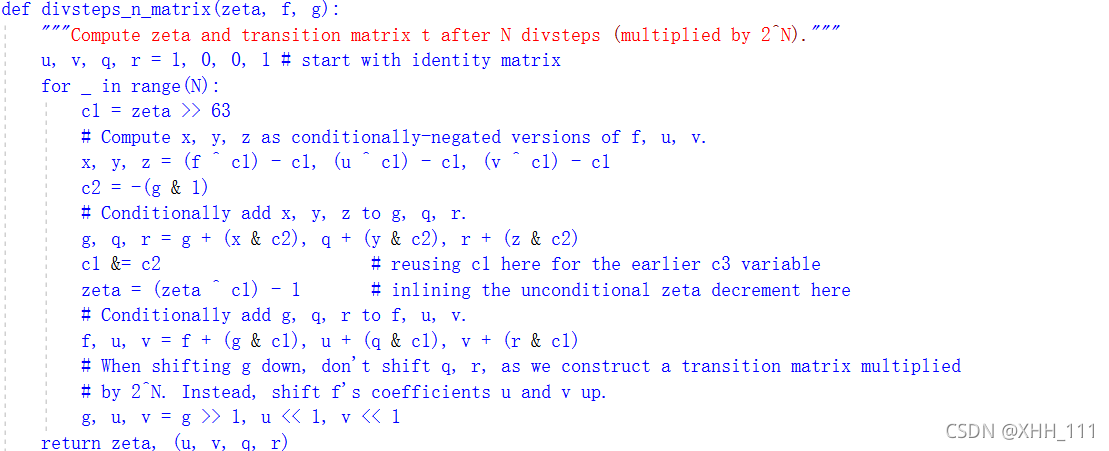 要获得可变时间版本,请将’divsteps_n_matrix’函数替换为divsteps循环的函数,以及在不使用固定迭代计数的情况下调用该函数的’modinv’版本:
要获得可变时间版本,请将’divsteps_n_matrix’函数替换为divsteps循环的函数,以及在不使用固定迭代计数的情况下调用该函数的’modinv’版本: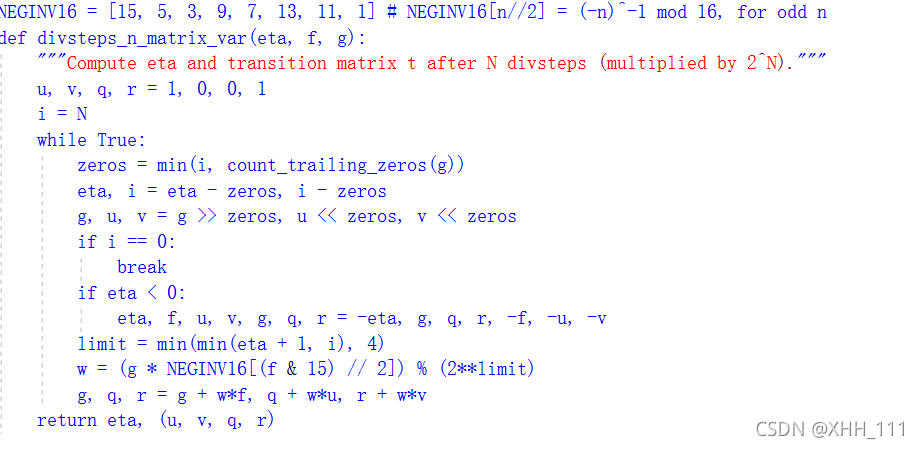
libsecp256k1中的代码实现
将x替换为其模逆mod modinfo->module。x必须在[0,模数]范围内。如果x为零,结果也将为零。如果不是,则必须存在倒数(即x和模数的gcd必须为1)。如果模数为素数,则自动满足这些规则。输出时,x的所有肢体都将在[0,2^30]范围内
取范围(-2模,模)内有符号的30号作为输入,并将模的倍数添加到范围[0,模)。如果符号<0,输入也将在过程中被求反。 在第一步中,如果输入为负,则添加模数,如果请求,则取反。这将使r从范围(-2模数,模数)变为范围(-模数,模数)。由于所有输入分支都在范围(-2^ 30,2^30)内,因此不能使int32\t溢出。请注意,下面的右移位是有符号符号扩展移位。
在第一步中,如果输入为负,则添加模数,如果请求,则取反。这将使r从范围(-2模数,模数)变为范围(-模数,模数)。由于所有输入分支都在范围(-2^ 30,2^30)内,因此不能使int32\t溢出。请注意,下面的右移位是有符号符号扩展移位。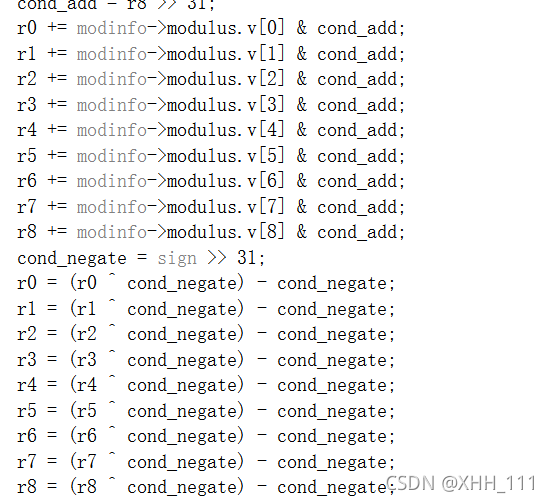
传播顶部位,使分支回到范围(-2^ 30,2^30)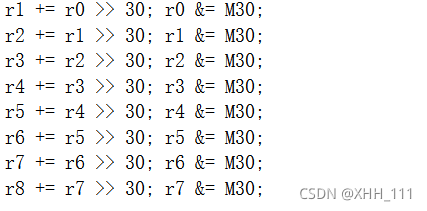 在第二步中,如果结果仍然为负,则再次添加模数,使r达到范围[0,模数)
在第二步中,如果结果仍然为负,则再次添加模数,使r达到范围[0,模数)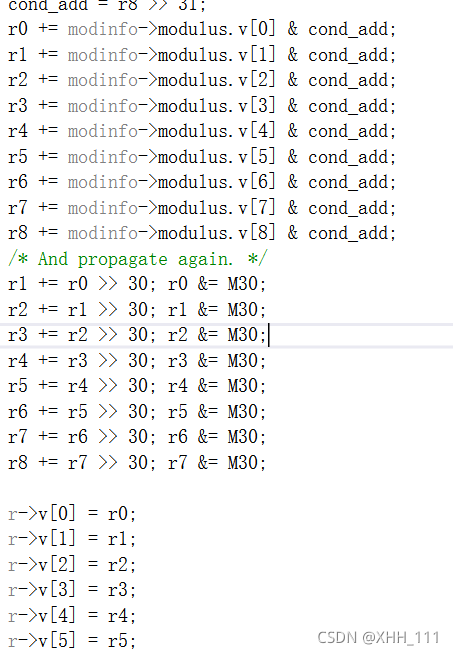
转移矩阵的数据类型
t=[u v]
[q r]
计算30步的转移矩阵和zeta。
输入:初始zeta
f0:初始f的底边
g0:初始g的底边
输出:t:转移矩阵
返回:最终zeta
实现解释中的divsteps\u n\u矩阵函数。
u、 v,q,r是正在建立的变换矩阵的元素,从单位矩阵开始。从语义上讲,它们是[-2^ 30,2^ 30]范围内的有符号整数,但在这里表示为无符号mod 2^ 32。这允许左移(对于负数为UB)。范围在[-2^ 31,2^31)内意味着对签名的铸造工作正常。
计算(zeta<0)和(g&1)的条件掩码。
计算x,y,z,f,u,v的条件求反版本
有条件地把x,y,z加到g,q,r上。
有条件地把g,q,r加到f,u,v上。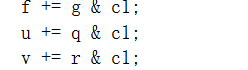
返回t中的数据和返回值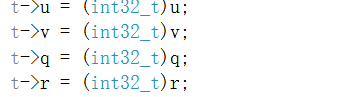
t的行列式必须是二的幂。这保证了与t相乘不会改变f和g的gcd,除了增加一个2的幂因子(将再次除以)。由于每个步骤的单个矩阵都有行列式2,因此其中30个步骤的总和将有行列式2^30
文章太长了,剩余部分放在下一篇博客来写。