DW1000 AOA Demonstration Primer
DW1000 AOA演示入门
DW1000到达角演示入门
1.2版本文件如有更改,恕不另行通知
文章目录
1-3章、同AOA-with-DW1000_V1.1
4、EVALUATING DECAWAVE 'S AOA DEMONSTRATION KIT(评估DECAWAVE的AOA演示套件)
Decawave开发了一个初步的AOA原型演示套件。该套件仍在开发中。Decawave可以为选定的客户提供早期技术访问。该套件包含一个带有PC GUI软件的硬件平台,用于演示基于DW1000的AOA解决方案。
4.1 What the kit does(工具包的作用是什么)
使用双向测距[参见APS013http://www.decawave.com/support#term5]来估计标签和AOA节点之间的距离。在测距过程中,AOA节点还可以提取角度估计值(参见第3节)。然后,AOA节点可以输出标签的范围和角度估计值。这些输出在UART接口上可用。
还提供了一个GUI,可以在网格上显示标签的位置和移动,参见下面的图4。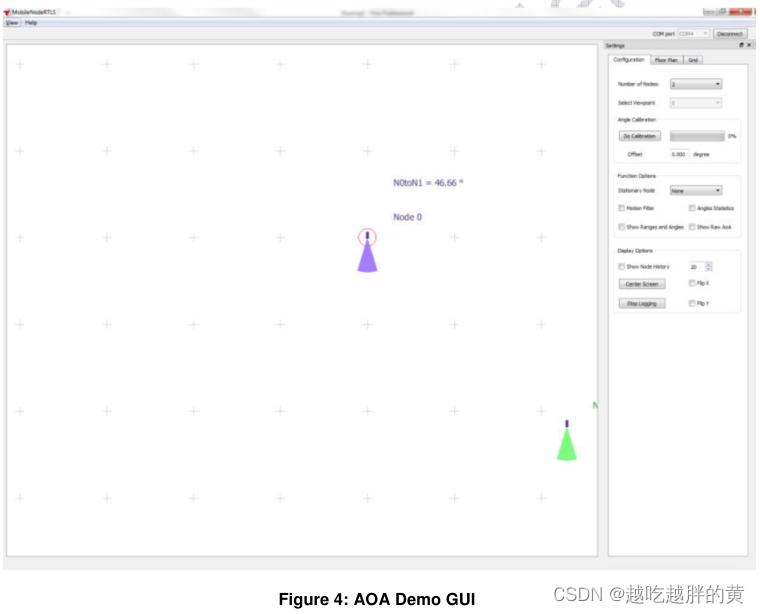
图4:AOA演示GUI
4.2 Kit Contents(工具包内容)
硬件:
1个AOA节点评估板,带有2个DW1000和集成的蒙娜丽莎AOA阵列
1个标签评估板(EVB1000)
1个标签天线 (will be integrated with the tag EVB in the future)(将来将与标签EVB集成)
电源和USB
软件:
- AOA节点ARM代码二进制
- AOA节点ARM源代码
- 标记ARM代码二进制
- 标记ARM源代码
- GUI可执行文件和源代码

图5:AOA工具包设置
4.3 AOA node Antenna Array(节点天线阵列)
蒙娜丽莎AOA天线阵列作为演示套件的一部分交付,如图6所示。这是带有指令元素的两元素面片阵列。它的前半球绝对值高达80度的方位角在实际角度和报告角度之间显示出良好的相关性。在该方位范围内,其PDOA vs AOA性能对标签天线方向的变化具有鲁棒性。![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JPwyBfqX-1650893279753)(C:\Users\HJX_j\AppData\Roaming\Typora\typora-user-images\image-20220425101852123.png)]](https://code84.com/wp-content/uploads/2022/09/896df7222e8648539b342b26326f1efa.png)
图6:蒙娜丽莎AOA天线阵列
4.4 Tag antenna orientation(标签天线方向)
标签天线的方向以其俯仰滚动和偏航为特征。这些术语的含义如图7所示,其中x轴代表零度偏航和俯仰时标签和AOA节点之间的视线。![(C:\Users\HJX_j\AppData\Roaming\Typora\typora-user-images\image-20220425102010924.png)]](https://code84.com/wp-content/uploads/2022/09/637b908b46594ac0b52c27a051a2aa3e.png)
图7:标签的俯仰、滚动和偏航
4.5 Typical Results(典型结果)
下图8显示了演示套件的典型报告到达角与实际到达角。在本例中,标签天线和AOA节点天线阵列位于同一水平面上,即标签的标高为零。此外,标签的俯仰、滚动和偏航均为零。
从图中可以看出,对于高于80度的正AOA,估计误差相当高。此外,对于90度AOA,估计角度变为负值,这在GUI中被视为“跳跃”到负角度。图9显示了该场景中测量的PDOA。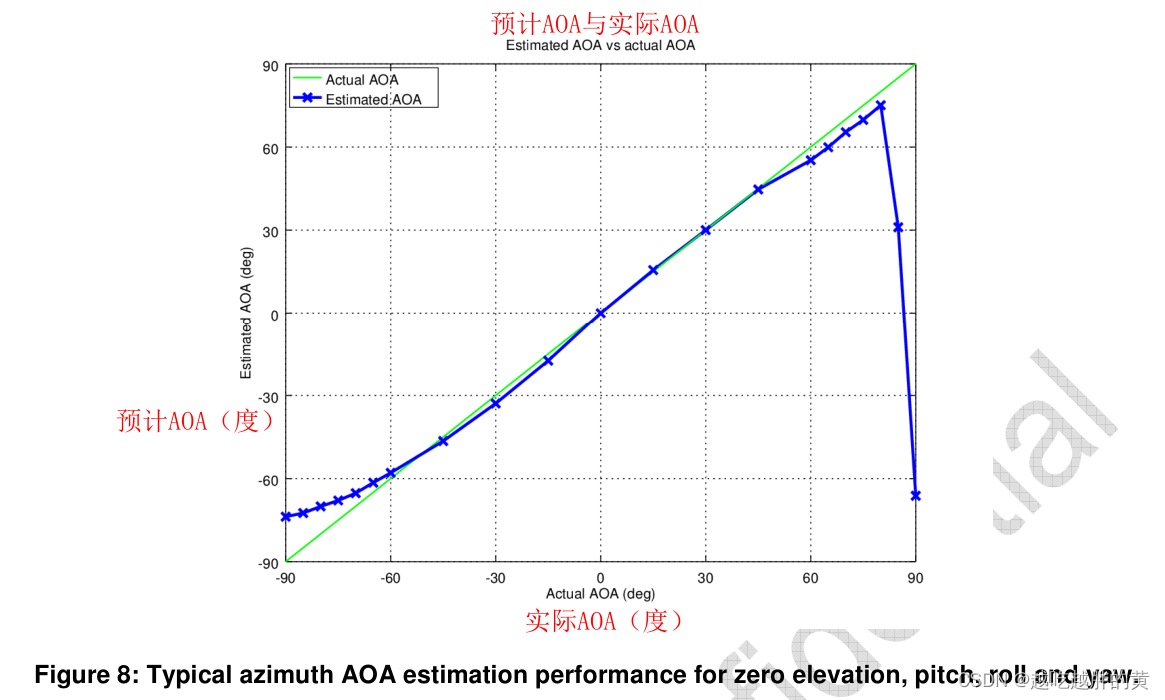
图8:零仰角、俯仰、横滚和偏航的典型方位角AOA估计性能
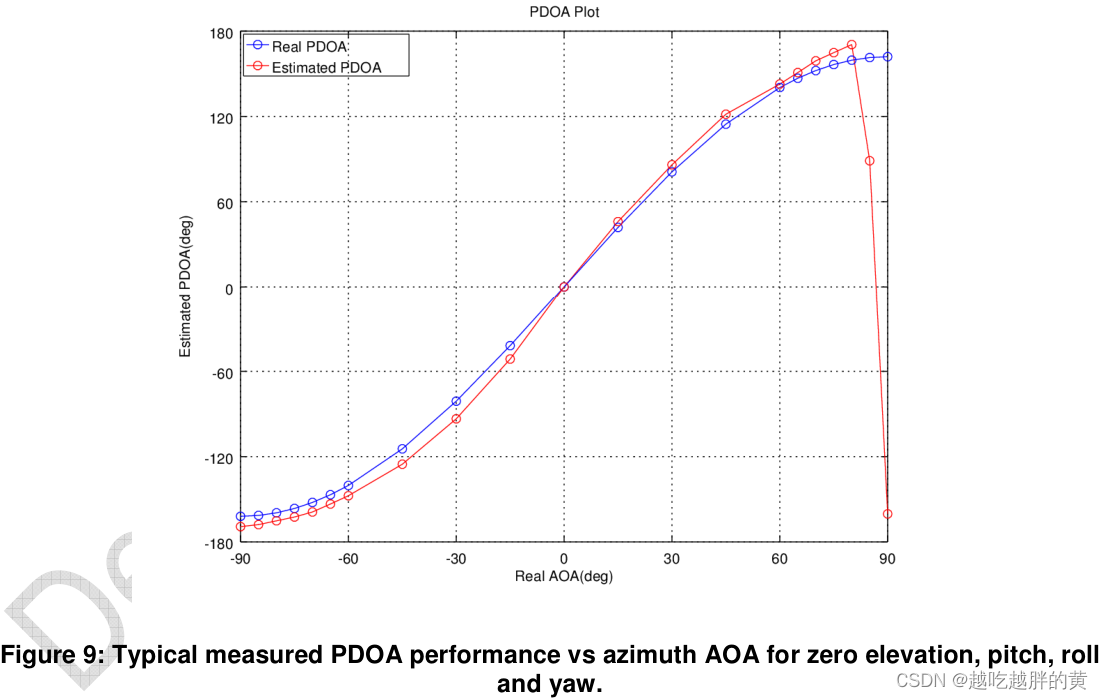
图9:零仰角、俯仰、横滚和偏航的典型测量PDOA性能与方位AOA
图10、图11和图12分别显示了标签偏航、俯仰和滚动的典型结果。
yaw, pitch and roll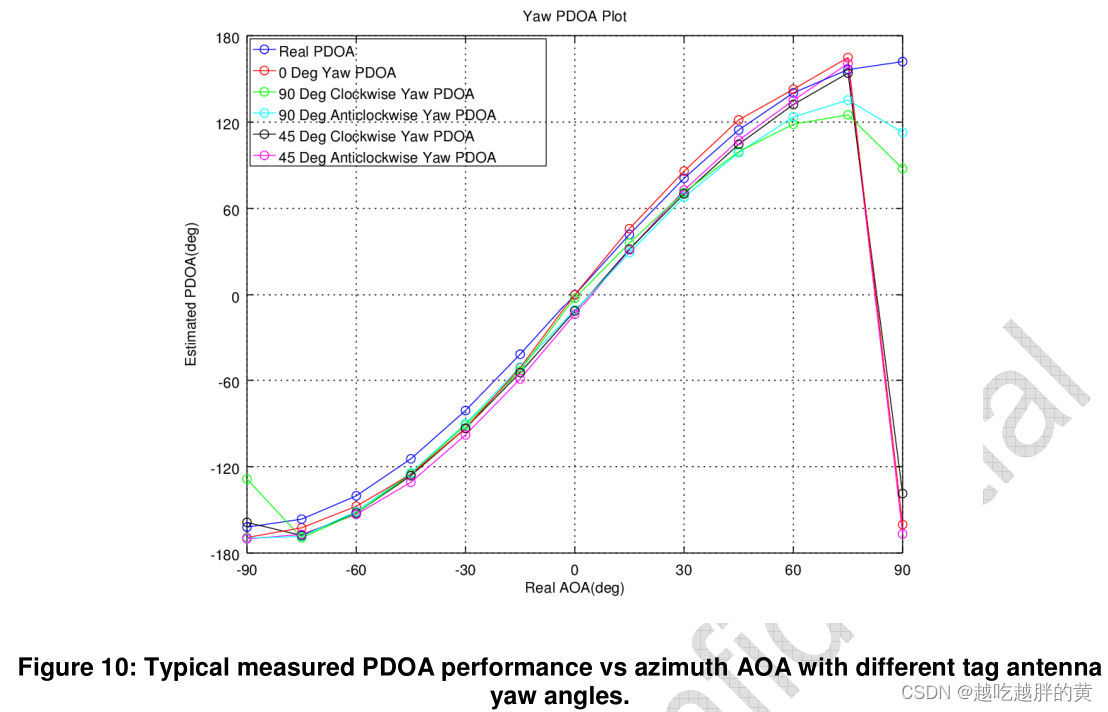
图10:不同标签天线偏航角的典型测量PDOA性能与方位AOA
Clockwise:顺时针
Anticlockwise:逆时针
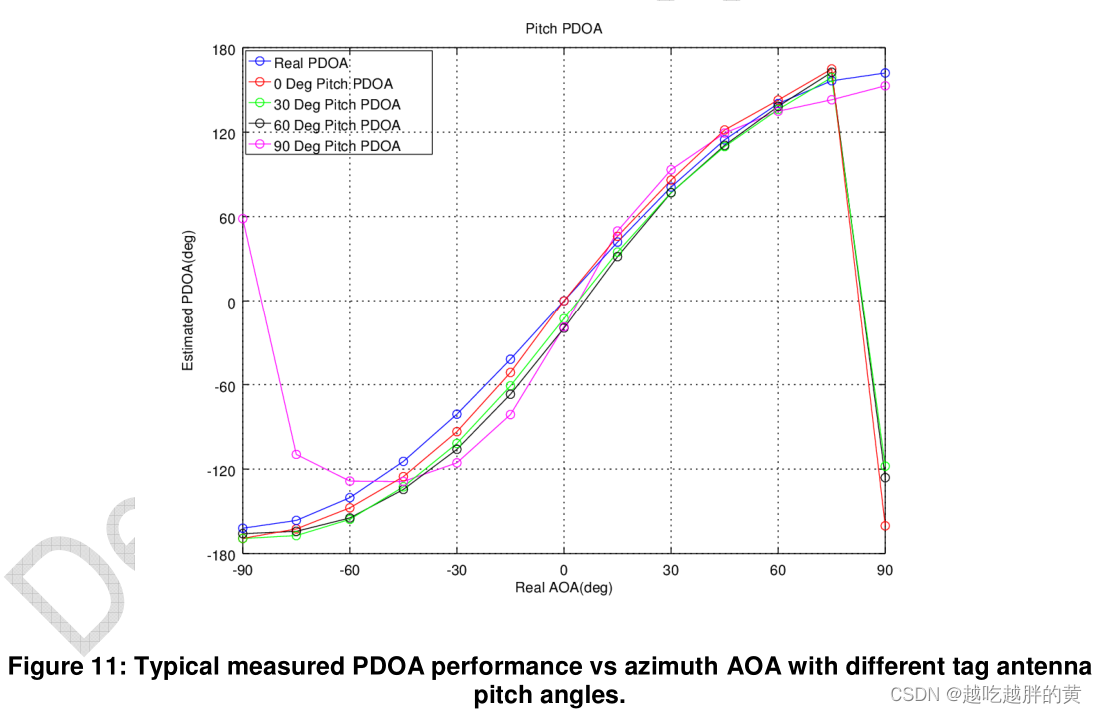
图11:不同标签天线俯仰角的典型测量PDOA性能与方位AOA
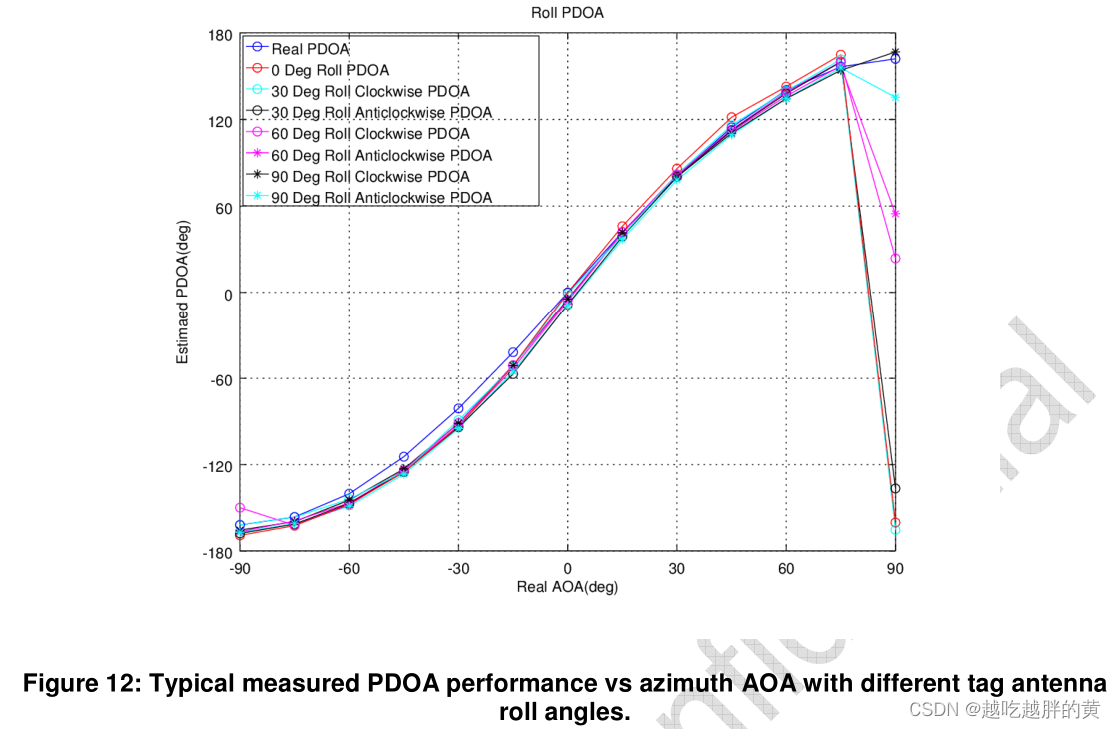
图12:不同标签天线滚动角下,典型测量的PDOA性能与方位AOA
图13显示了在AOA节点平面上更改标记高度w.r.t.的典型结果。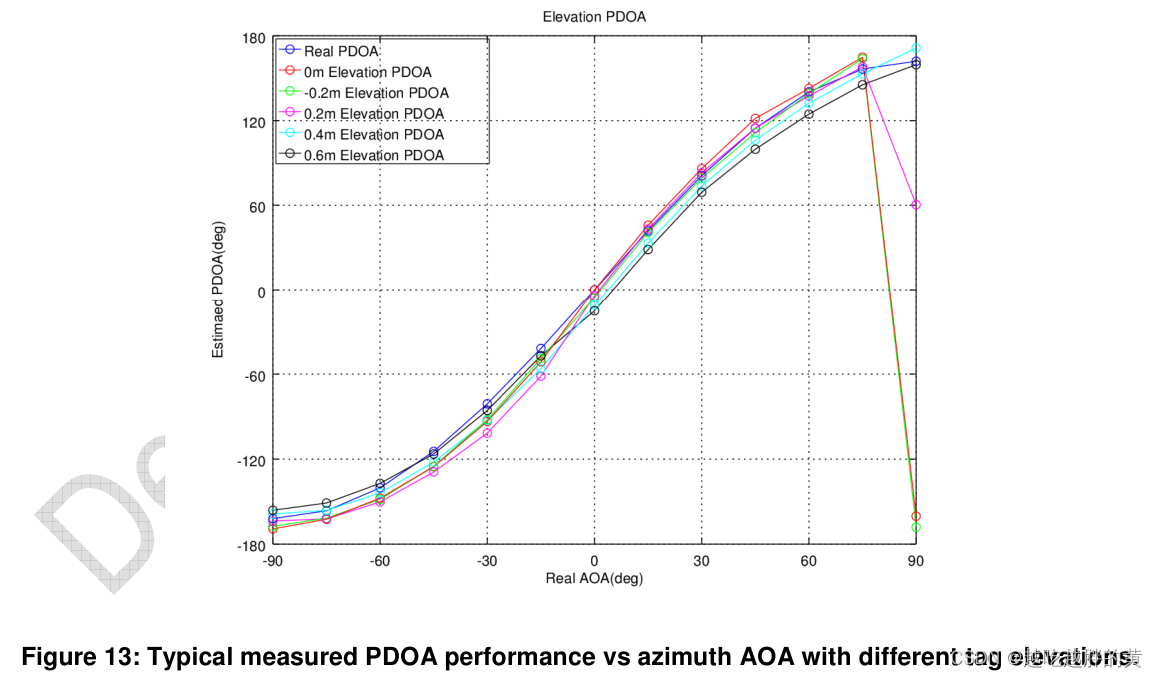
图13:不同标签高度的典型测量PDOA性能与方位AOA
Elevation:Elevation
5、LIMITATIONS AND FUTURE WORK(局限性和今后的工作)
5.1 Limitations(局限性)
5.1.1 Azimuth angle range(方位角范围)
在AOA节点的前半半球,可以成功估计AOA的方位角范围高达±80度。AOA天线阵列的设计不是为了测量其后半半球的PDOA,后者面向其地平面。
5.1.2 Azimuth angle estimation accuracy(方位角估计精度)
对于标签和节点天线的这种组合,PDOA在绝对值较高的负角度下饱和,而在正角度较高时则跳跃。标签方位角估计与实际方位角的误差如图14所示。对于AOA的高绝对值,可以使用适当的查找表,而不是第3节中给出的PDOA到AOA的转换公式,从而在一定程度上提高估算精度。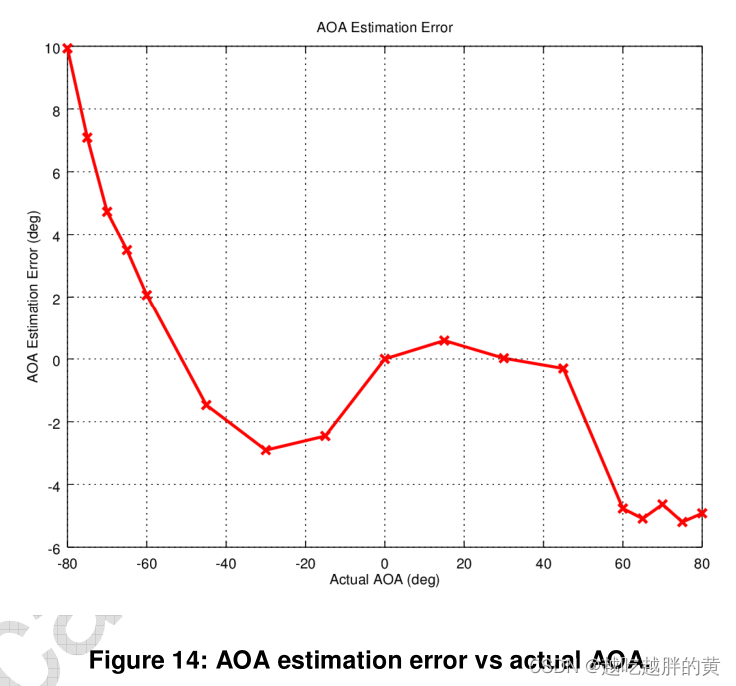
图14:AOA估计误差与实际AOA
5.1.3 Tag elevation(标签高度)
图13所示的测量结果显示方位角估计对标签高程变化具有相当大的弹性。
然而,使用的AOA天线阵列有两个元素。因此,理论上,它只能在一个维度上测量角度。该维度是由AOA节点数组元素的位置和标记位置定义的平面。当转换为球坐标时,该角度表示为θp,与标签方位角和仰角有关,如下所示:
sin θp = sin θ cos φ
式中,θ是第2节中的方位角,φ是仰角。这一事实限制了为任意仰角估计标签方位角的可能性,这在许多应用中都是必需的。为了估计标签的空间角度(azimuth and elevation angle)(方位角和仰角),需要使用至少三个元素的更复杂阵列几何图形。
5.2 Future work(今后的工作)
5.2.1 New AOA antenna array designs(新型AOA天线阵列设计)
正在进行进一步的天线优化,以减少上述限制。
5.2.2 Temperature tests(温度测试)
本文件中报告的所有实验均在室温下进行。将在不同温度下测试套件的性能。
A PPENDIX A: PDOA POST - PROCESSING METHODOLOGY(附录A:PDO后处理方法)
让我们考虑一个场景,其中套件在方位角上使用绝对值大于80度的方位角。在该区域,由于个别测量显示出与平均值的变化,一些PDOA测量将越过±π相位不连续性,如图15所示。这将在GUI中显示为在正AOA和负AOA之间跳跃。此外,跳跃会使测量值的平均值产生偏差,并显著增加标准偏差。
为了得到圆上PDOA的平均值和标准偏差,可以使用PDOA的当前估计值将相位不连续点从±π移开。例如,如果PDOA的当前估计值接近π,则允许相位可以是π/2到3π/2。为实现这一目标而提出的公式是![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6r9knUXz-1650893279755)(C:\Users\HJX_j\AppData\Roaming\Typora\typora-user-images\image-20220425111631652.png)]](https://code84.com/wp-content/uploads/2022/09/73dbd5f8f5a24b38a4915a81effb91ae.png)
请注意,上述公式允许防止PDOA跳跃,从而正确计算圆上的PDOA平均值和标准偏差。然而,它并不能阻止AOA的跳跃,因为任何给定的PD和相应的PDc都会导致相同的AOA估计。此外,如果跳跃严重,即如果正PDOA测量值和负PDOA测量值的数量相似,则上述方法不成功。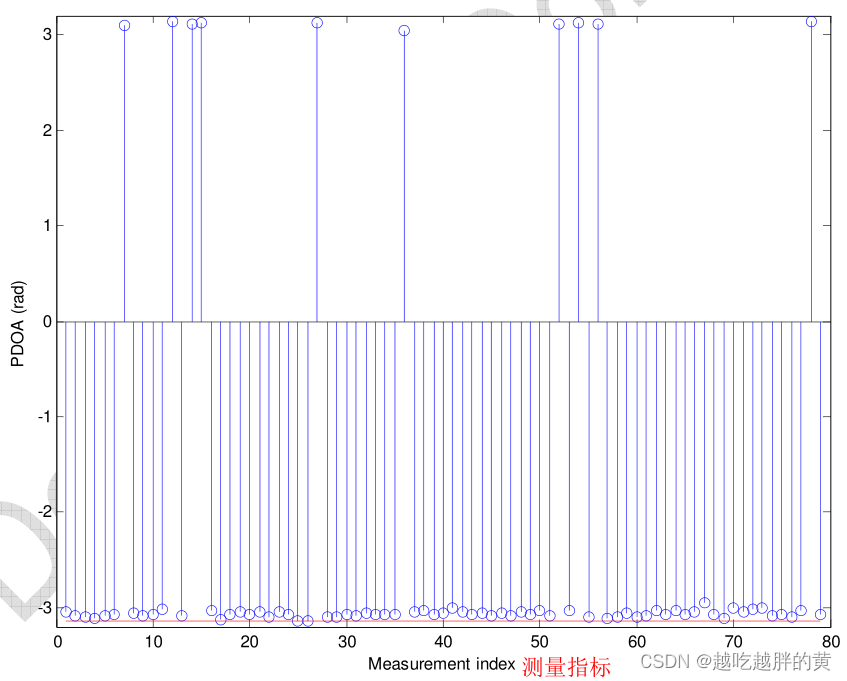
图15:带跳跃的原始PDOA数据
图16显示了图15中给出的原始数据的PDOA跳跃预防,其中PD^计算为前八个PD值的平均值。在已知AOA的实验室测量中,可以使用以下公式代替上述公式: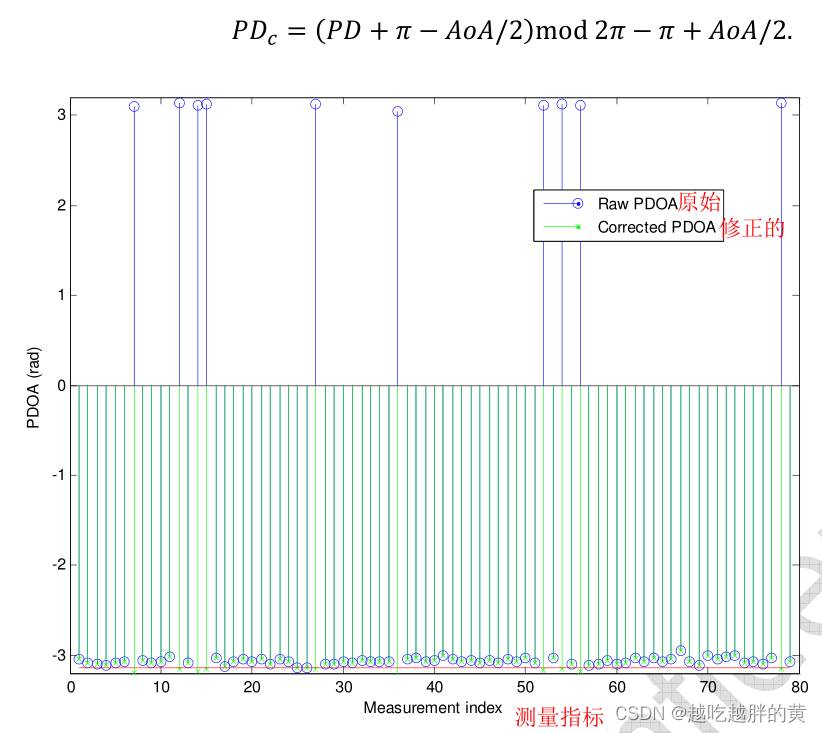
图16:原始PDOA数据和修正的PDOA数据