AOA-with-DW1000_V1.1
使用DW1000的到达角
使用DW1000测量到达角
1.1版
本文件如有变更,恕不另行通知
文章目录
- AOA-with-DW1000_V1.1
- 使用DW1000的到达角
- 1、INTRODUCTION(导言)
- 2、ANGLE OF ARRIVAL FUNDAMENTALS(到达角基本原理)
- 3、USING DW1000 FOR ANGLE OF ARRIVAL (PDOA)(将DW1000用于到达角(PDOA))
- 4、KNOWN SYSTEM CONSTRAINTS AND IMPROVEMENTS UNDER INVESTIGATION(调查中已知的系统约束和改进)
- 5、ANCHOR ANTENNA ARRAY TARGET SPECIFICATION(锚天线阵列目标规范)
- 6、REFERENCES(参考文献)
- 7、DOCUMENT HISTORY(历史文件)
- 8、ABOUT DECAWAVE(关于DECAWAVE)
1、INTRODUCTION(导言)
DW1000可以实现精确的到达角估计和精确的距离估计,这使得人们可以设计各种低成本的位置感知应用。
本文概述了如何使用Decawave的DW1000 IC和相位差到达(PDoA)方案实现到达角(AoA)解决方案。
它还描述了一些系统约束和正在研究的克服这些约束的措施。
2、ANGLE OF ARRIVAL FUNDAMENTALS(到达角基本原理)
使用DW1000等脉冲无线电超宽带(IR-UWB)技术,可以使用三种方案来计算从IR-UWB源(tag)传输到两个IR-UWB接收机(锚)的到达角:
- 飞行时间(ToF)[其中飞行时间值之间的差值用于估计角度]
- 到达时差(TDoA)[其中接收时间戳之间的增量用于估计角度]
- PDoA(PDoA)[其中接收载波的相位用于估计角度]
对于基于DW1000的AoA解决方案,PDoA提供了最高的角度估计精度,这是本文中描述的方案。
2.1 Angle of Arrival – general case(到达角一般情况)
考虑到我们有一个从远方发射机发送的无线电信号,它到达两个天线或单个天线的两个单元。这如下图1所示。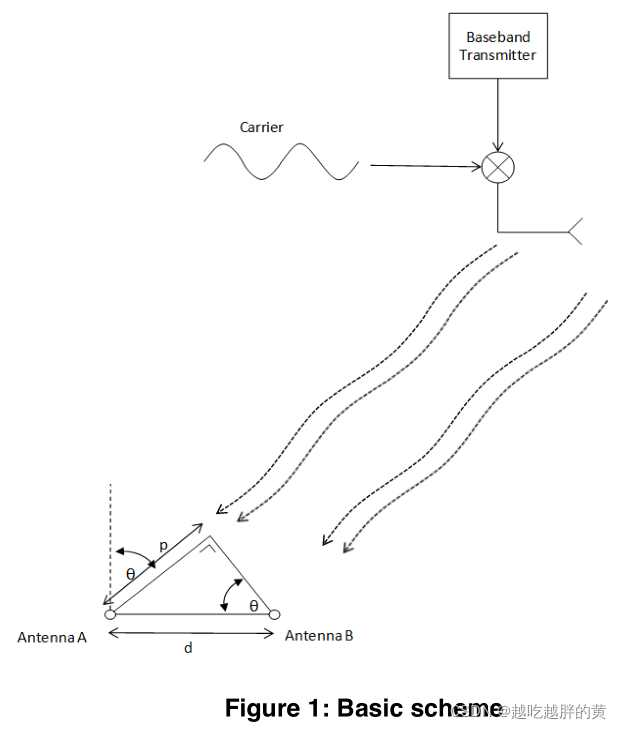
图1:基本方案
Baseband Transmitter:基带发射机
Carrier:载体
Antenna A:天线A
可以看出,由于非零入射角,无线电信号将先到达一个天线,再到达另一个天线。到天线A的路径比到天线B的路径大p=d.sin(θ)。如果假设信号在自由空间中传播,不受阻碍或经过变换,那么信号传播到天线A所需的时间将更长。为了计算入射角,可以找到每个天线的到达时间,以及用于估计p和θ的差值。
2.2 Angle of Arrival – PDoA case(到达角——PDoA情况)
另一种估计p和θ的方法是测量两个到达信号的相位差。图2显示了两个接收器(2 x DW1000),它们由同一个晶体计时。因为它们具有相同的晶体,为相同的PLL计时,所以提供给两个下变频器混频器的生成载波将具有相同的相位。
无线电信号到达天线a的时间比到达天线B的时间稍晚,因此它将遇到混频器中不同的下变频器载波相位。如果基带处理器能够计算信道的复杂冲激响应,则该冲激响应将具有不同的I/Q关系,该关系等于信号在遇到混频器并被载波下变频之前经过额外距离p而引起的相位延迟。如果载波频率很高,例如4GHz或6.5GHz,那么波长将只有几厘米,因此非常小的距离p将导致相对较大的载波相位差。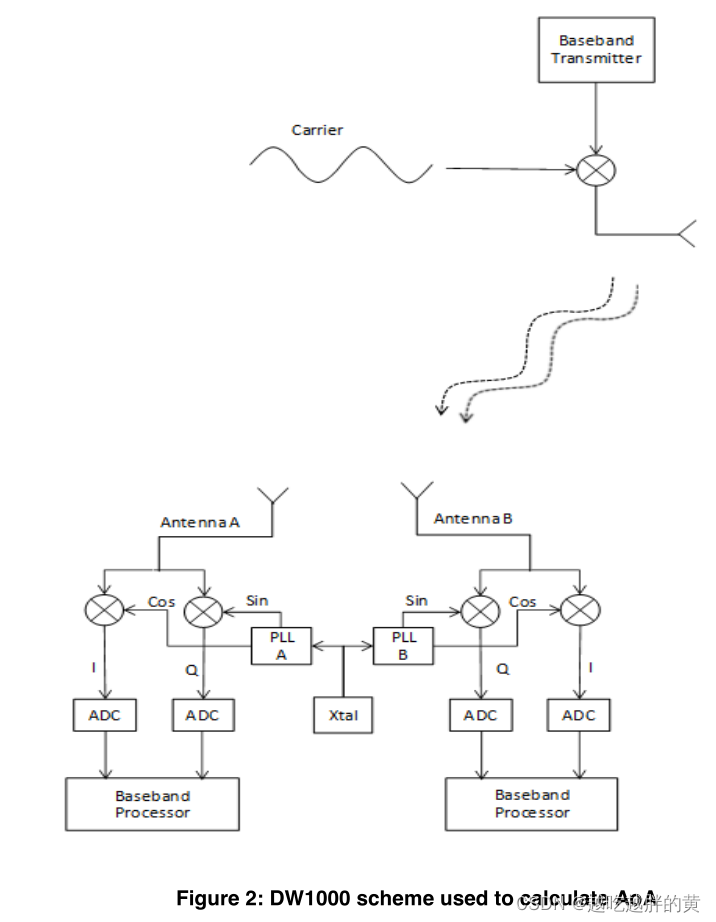
图2:用于计算AoA的DW1000方案
2.2.1 Receivers Antenna Separation (接收机天线分离)
如果将d(辐射天线单元之间的间距)设置为半波长,则图3显示了脉冲响应的相位差α和入射角θ之间的关系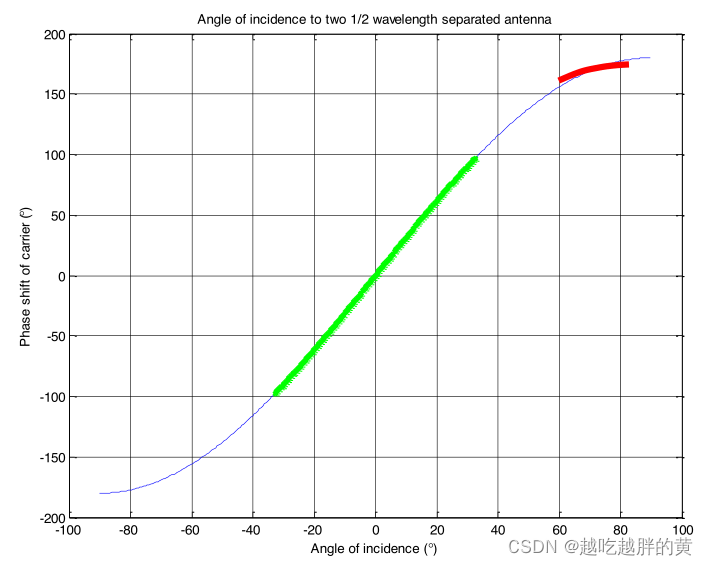
Angle of incidence to two 1/2 wavelength separated antenna:两个1/2波长分离天线的入射角
Angle of incidence:入射角
Phase shift of carrier :载波相移
从图3可以看出,绿色部分的坡度为3,而红色部分的坡度为0.6。这意味着,红色部分的相位角测量误差比绿色部分的入射角误差大5倍。
注:如果天线辐射单元之间的间距d大于λ/2,则每个相位关系都有多个可能的入射角解,因此存在歧义。
以上所有假设信号将延迟到达天线,但在其他方面不变。实际上,每个天线单元的信道不是线性相位信道,会引入群时延和相位时延。
AoA的锚定天线(接收侧)应在其中心辐射点之间选择/设计λ/2(或略小于λ/2)间距,并尽可能优化线性相位和一致的群延迟。第5节为这些天线阵列的设计和优化提供了目标规范。
3、USING DW1000 FOR ANGLE OF ARRIVAL (PDOA)(将DW1000用于到达角(PDOA))
Decawave拥有一种正在申请专利的方法,该方法使用到达相位差来估计AoA。
该方法可以使用2 x DW1000 IC(主站和从站)来实现,该IC从相同的38.4 MHz参考时钟输入进行计时。每个DW1000连接到一个天线,天线之间的最佳间隔约为λ/2。使用这种硬件设置,可以计算每个天线接收到的信号之间的相位差(以及到达角)。
相位差(PD)的计算如下:
- 接收到帧时,从每个DW1000 (A and B)(A和B)读取第一个路径索引,并从FP索引处的累加器读取复杂样本。
- 读取寄存器0x15,偏移量5,两个字节(FP_INDEX的10个最高有效位代表数字的整数部分,6个最低有效位代表小数部分)
- 转换为浮点值(e.g. 745.67)(例如745.67),然后添加0.5
- 然后截断结果值(e.g. 746)(例如746)
- 获得累加器索引,即累加器中计算相位差的位置,(e.g. 2984) (=746 x 4 because they are 16-bit complex numbers)(例如,2984)(=746 x 4,因为它们是16位复数)
- 读取此索引处的累加器值 (reading 5 bytes to get 2 byte real and 2 byte imaginary value)(读取5个字节以获得2字节的实值和2字节的虚值)
- 将累加器值视为复数-获取要获得的复数的arctan(accangleA,accangleB)
- 然后从每个(sfdangleA,sfdangleB)读取SFD角度 (register 0x14, offset 3, one byte)(寄存器0x14,偏移量3,一个字节)。SFD角度 (in radians) (弧度)通过乘以π/64获得
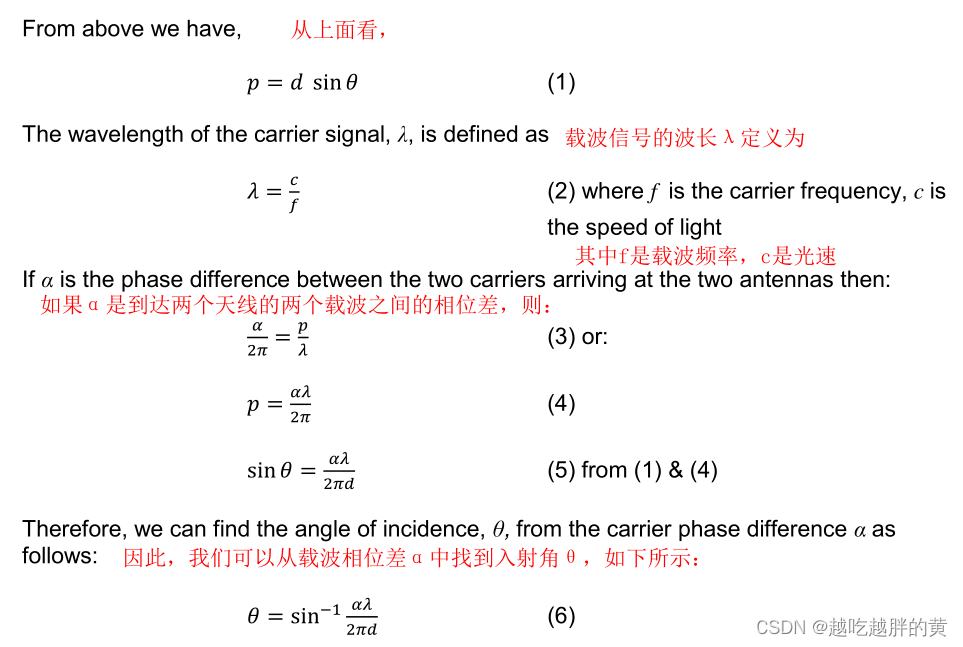
- 接下来计算相位差PDx,我们使用以下公式:
PDx = ((accangleA - sfdangleA) – (accangleB - sfdangleB)) + π; - 然后模2π作为范围应该是0到2π,最后减去π,得到PD。
- 然后通过以下公式得出角度:
AoA (in radians) = PD/2 (Derived using a straight-line formula from Figure 3)
注:Decawave的实验表明,使用略小于λ/2的天线间距可以提高报告的角度精度,接近±90º极限。在这些实验中,当在信道5(6489.6MHz)下运行时,锚定天线间距设置为2.08,而不是2.31cm,即λ/2。在这种情况下,使用AoA=PD/1.8推导角度。
3.1 Experimental Results(实验结果)
下面的图4显示了使用信道5上2.08cm (anchor)(锚)的天线间距报告的典型到达角与实际到达角。在本测试中,标签天线和锚天线处于相同高度,且具有相同的天线极化。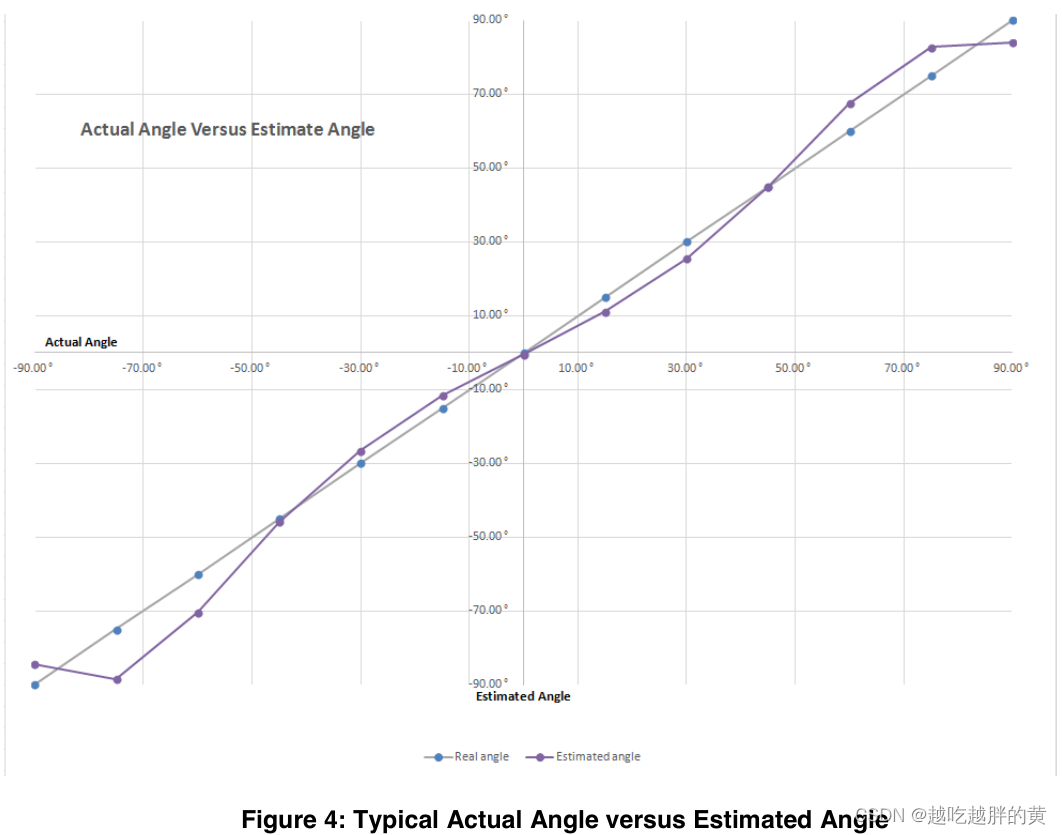
图4:典型实际角度与估计角度
Actual Angle Versus Estimate Angle:实际角度与估计角度
Actual Angle:实际角度
Estimated Angle:估计角度
4、KNOWN SYSTEM CONSTRAINTS AND IMPROVEMENTS UNDER INVESTIGATION(调查中已知的系统约束和改进)
4.1 Known System Constraints(已知系统约束)
初步实验表明,当标签天线和锚天线处于相同高度且具有相同的天线极化时,报告的角度精度如图4所示。从图4可以看出,相位差和角度之间的关系不是线性的,因此正在进行天线阵列的设计工作,以便可以应用简单的曲线拟合公式。除了这种不准确的来源外,还观察到以下报告的角度误差来源:
- 标记锚定高度:-如果标记和锚定不在同一平面上,角度不准确度会增加。这是由于:
- 随着高度的增加,真实角度会小于方位角。例如,关于从头顶到双脚中间点的垂直线,你的左肩在+90°,右肩在-90°,但关于头顶的一点,你的左肩在+45°,右肩在-45°。
- 随着高度增量的变化,天线辐射方向图也会发生变化,并可能导致相位变化。天线设计优化正在进行,以尽量减少上述影响。
- 标签锚定极化:-如果标签和锚定天线阵列的天线极化不同,测量的PDOA可能与预期值存在显著差异。在极端情况下(e.g. tag antenna is vertically polarised and anchor is horizontally with respect to each other) (例如,标签天线垂直极化,锚彼此水平),则测量的PDOA误差可能为+90°。不同的标签锚天线极化可能由以下原因引起:
- 俯仰(如标签天线倾斜wrt至锚)
- 滚动(如将天线正面贴在锚上,旋转wrt至锚)
- 偏航(如标签天线旋转垂直轴wrt至锚定)
4.2 Improvements under investigation(改善措施仍在调查中)
最具挑战性的系统约束是由于标签锚天线极化差异导致的PDOA变化。迄今为止,使用圆极化标签天线在减少因不同天线极化而产生的PDOA变化方面取得了最佳效果。
Decawave使用定制设计的标签大小的圆形极化天线和线性极化锚阵列的初步结果给出了以下结果:
- 俯仰:在整个180ºAOA范围内,从无标记俯仰到锚定天线的60º标记俯仰wrt,AOA精度为±12º。
- 滚动:在整个180ºAOA范围内,从无标签滚动到锚定天线的90º标签滚动wrt,AOA精度为±30º。
- 偏航:在整个180ºAOA范围内,从无标签偏航到锚定天线的90º标签俯仰wrt,AOA精度为±17º。
注:在实践中,由于标签的相对方向,AOA精度可通过俯仰、横滚和偏航AOA精度的组合来确定,因此上述值可能会更好或更差。需要进一步调查,以确定这些类型的俯仰、横摇和偏航组合的AOA精度。
5、ANCHOR ANTENNA ARRAY TARGET SPECIFICATION(锚天线阵列目标规范)
本节提供了天线阵列(2 radiating elements)(2个辐射单元)的目标规范,用于使用Decawave的DW1000 IC和相位差到达(PDoA)方案实现到达角(AoA)解决方案。本节还介绍了这些天线的测试方法。
5.1 Target Specifications(目标规格)
5.1.1 General Specifications for each Array Element(每个阵列元素的一般规格)
以下规范不是特定于UWB的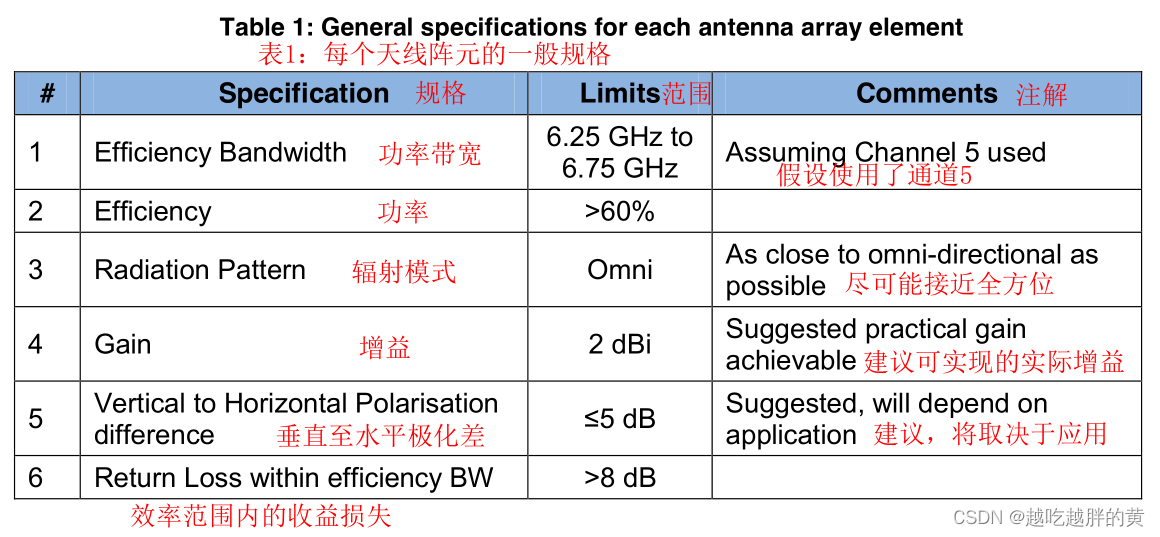
表1:每个天线阵元的一般规格
5.1.2 Specific UWB Specifications for each Array Element(每个阵列元素的特定UWB规范)
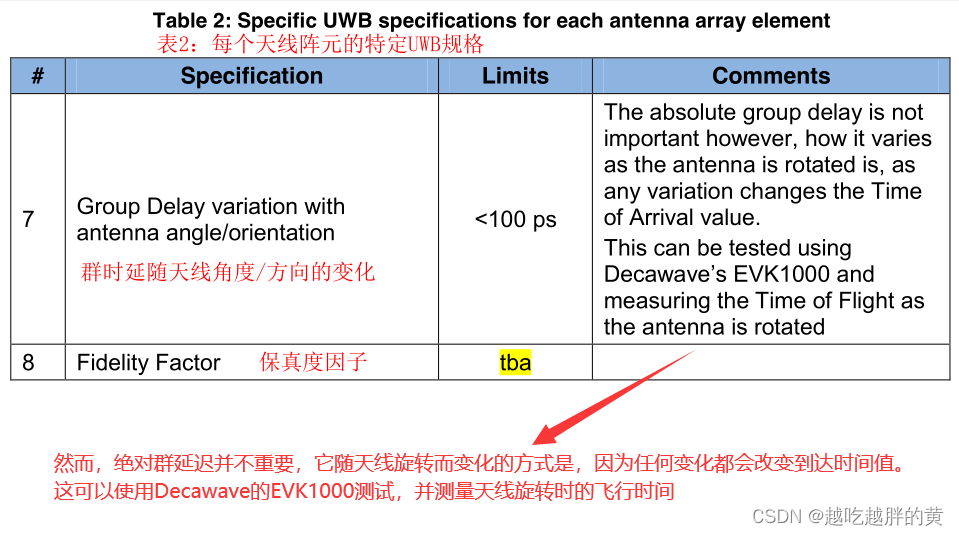
表2:每个天线阵元的特定UWB规格
5.1.3 Specific Specifications for Antenna Array(天线阵列的具体规格)
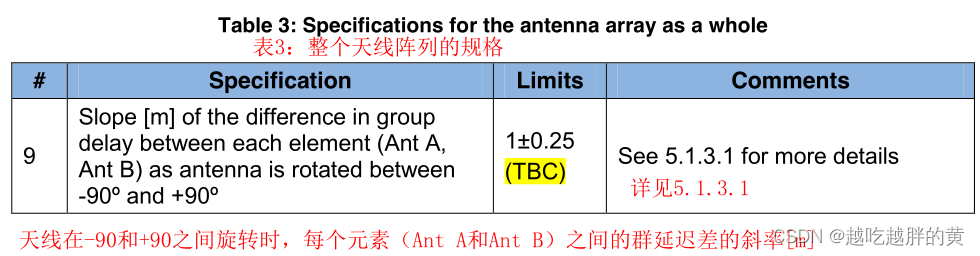
表3:整个天线阵列的规格
5.1.3.1 Testing the Antenna Array for difference in group delay(测试天线阵列的群时延差异)
本节介绍如何测试上述规范#9。
参考天线与阵列元件AntA和AntB等距离放置,如下所示。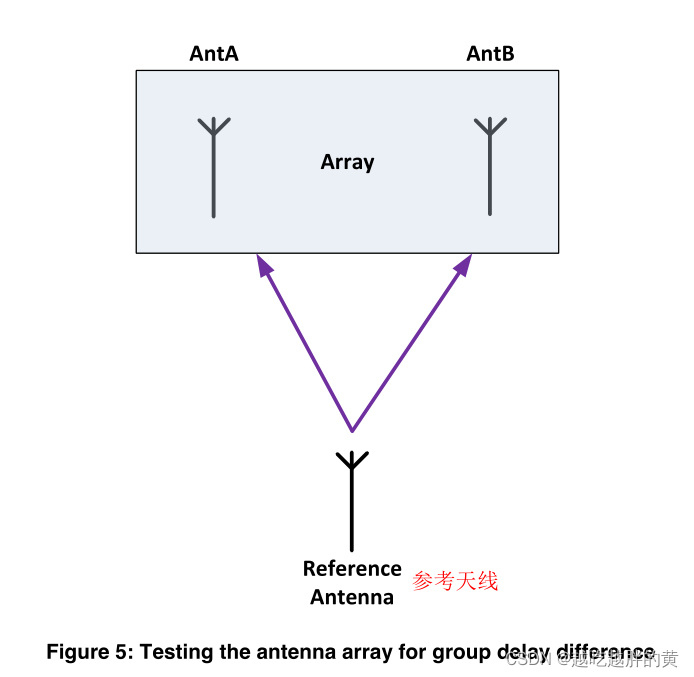
图5:测试天线阵列的群时延差
在信道(5)的中心频率f o(6489.6 MHz)下,测量从参考天线到Ant A,然后到Ant B的群延迟。如果无法直接测量群延迟,则可以在(fo–x MHz)和(fo+x MHz)下测量相位,并从相位差得出群延迟。
然后旋转阵列,并在每一步记录群延迟。当旋转从-90⁰ 至+90⁰ 完成后,绘制了群延迟与旋转角度的关系图。绘图应接近直线,直线的斜率应在1±0.25范围内,如图6所示。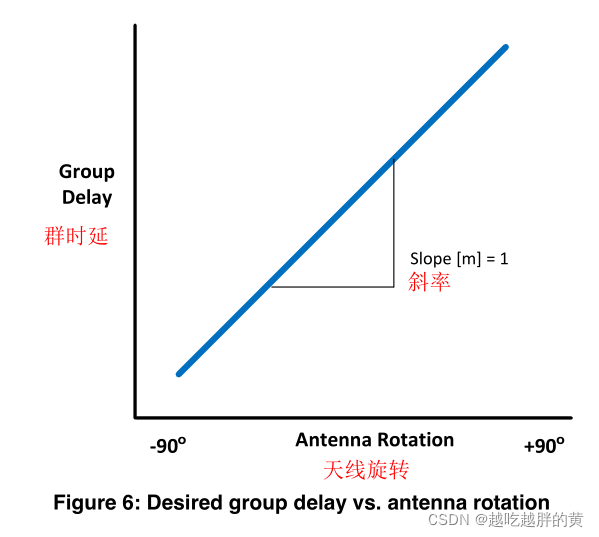
图6:期望群延迟与天线旋转
6、REFERENCES(参考文献)
6.1 Listing(清单)
本文件过程中参考了以下文件:
7、DOCUMENT HISTORY(历史文件)
7.1 Revision History(修订历史)

8、ABOUT DECAWAVE(关于DECAWAVE)
Decawave是一家领先的无晶圆厂半导体公司,其旗舰产品DW1000是一款基于IEEE 802.15.42011 UWB标准的完整单芯片CMOS超宽带IC。该设备是以110 kbps、850 kbps和6.8 Mbps的数据速率运行的部件系列中的第一款。
由此产生的硅芯片在制造、医疗、照明、安全、运输、库存和供应链管理等领域的实时定位系统(RTLS)和超低功耗无线收发器上都有广泛的基于标准的应用。