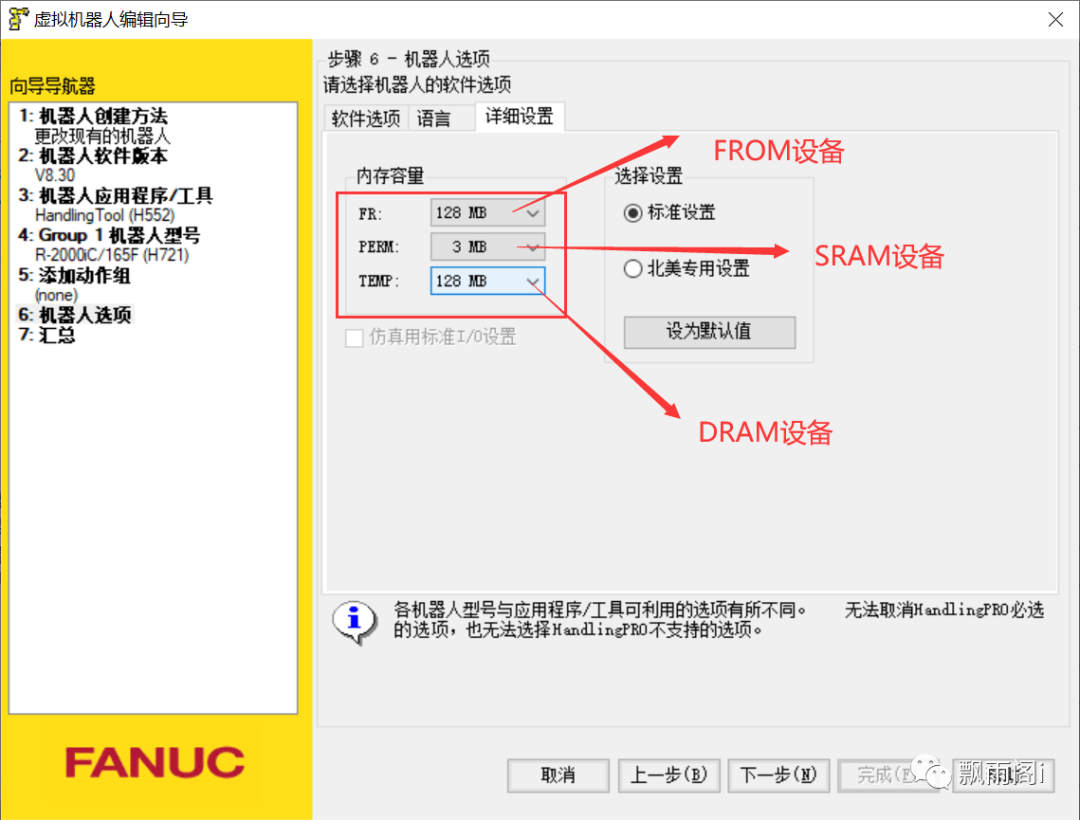
机器人主板上一共有三个物理内存设备,以下是简单结构图
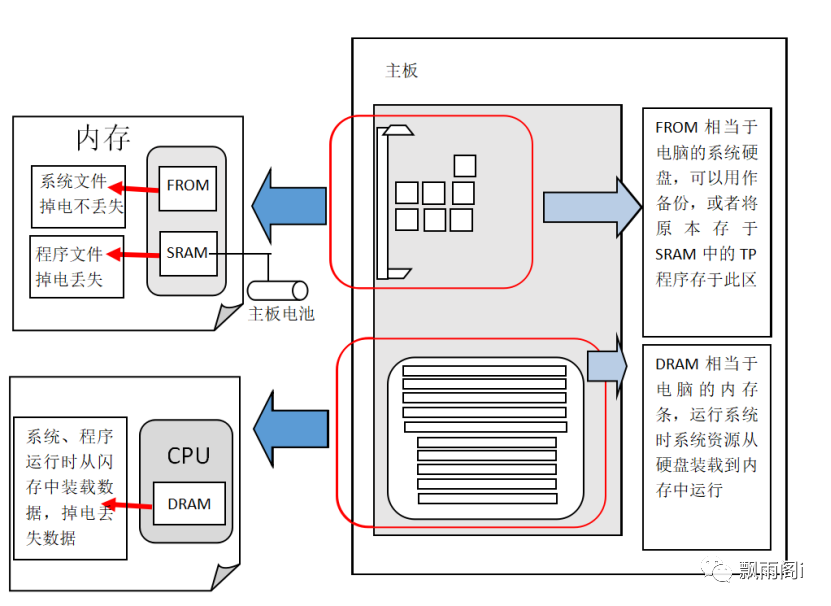
这三个设备分为了(FROM、SRAM和DRAM)
我们知道PC个人电脑在装系统时也是有很多的区

那么机器人也是有对内存进行分区的
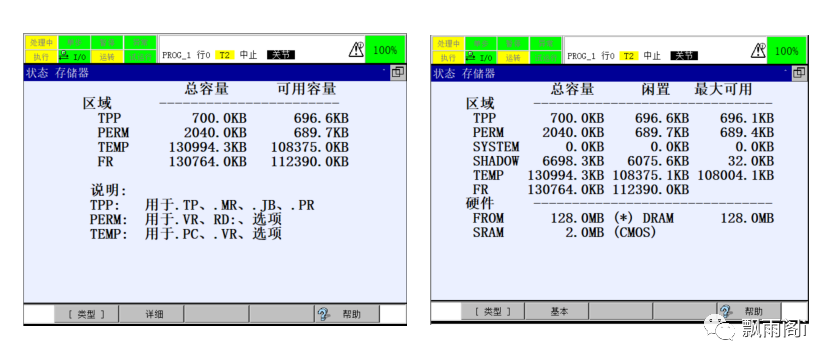
每个区都有相对应的功能
TPP (SRAM设备) 存储用户程序和TP程序 掉电不丢失。PERM (SRAM/CMOS设备) 存储用户系统变量 掉电不丢失。TEMP (DRAM设备) 称为临时存 储器(TEMP)。系统软件在DRAM内存中执行。KAREL程序(PC程序)、TP程序和大多数KAREL变量(VR)都被加载 到DRAM中并从此处执行。SADOW (FROM设备)与SRAM功能相同,但断电不丢失,区别是存储静态变量,用FOR循环或其他的动态变量,效率(处理能力)不如SRAM的高。FILE (用户指定设备)这是用户 指定的设备,可以是MD、MC、FROM、UD、UTFR (FROM设备) 系统文件存储区,系统启动时从该设备加载系统文件下面说明程序处于编辑状态、运行状态和未编辑未运行状态
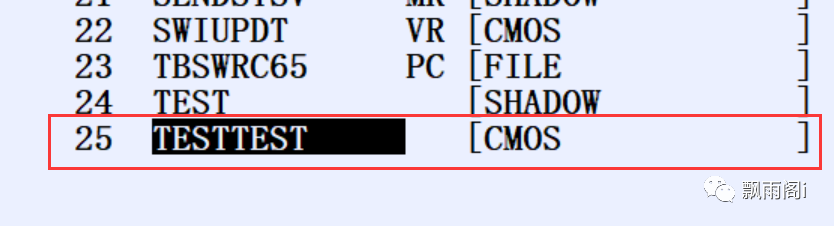
程序处于未编辑未运行状态,程序默认存储在CMOS区
 2. 程序处于编辑时,如果在其他区,则会移动到CMOS区
2. 程序处于编辑时,如果在其他区,则会移动到CMOS区
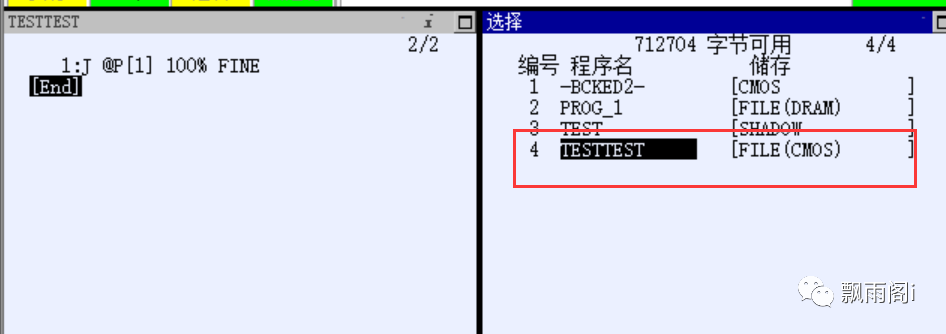
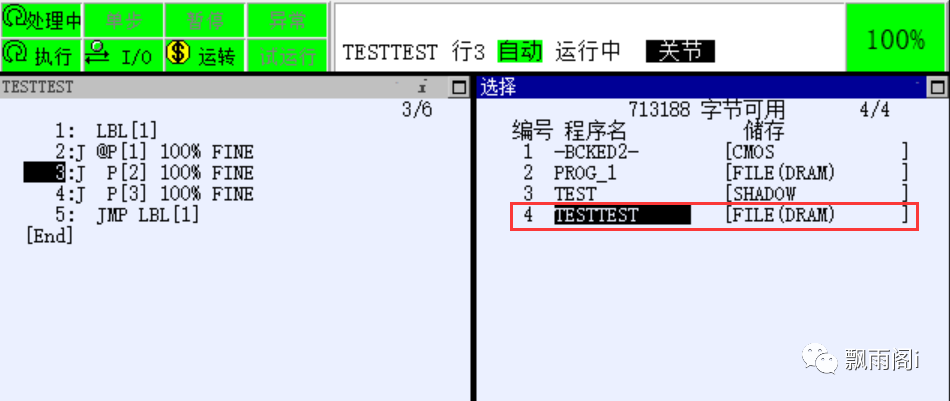
例如该程序是在FILE区(用户自定义设备)在未编辑时是在DRAM设备中

TESTTEST由默认的存储区CMOS(SRAM)区转移到UD1路径下,程序存储位置显示 “FILE(DRAM)”,说明该程序会在冷启动(开机)时读取TP程序到DRAM中,断电则依旧保存在UD1中。
当编辑程序时,程序会移动至CMOS区
而当运行此程序时,程序会移动至DRAM设备中
说明在CMOS设备中编辑程序和默认存储程序,而在DRAM中运行程序
如果所有的TP程序从CMOS转移到其他区,则这个区是单个程序编辑时最大所支持的容量,如果单个程序超出CMOS区的内存,那么程序将不能加载,并提示“内存不足”的报警。
我们发现机器人的CMOS区域很小,3MB的内存存不了特别多的程序,如果内存满了,则需要将部分程序删掉才能够再加载程序,而DRAM和FROM这两个设备内存空间还很多,可以使用R709 TP DRAM/FILE Storage 和R798 ! DRAM File Storage 这两个选项将程序转移到FROM设备或者UD、UT、MC中,只要DRAM的空间还很多(程序装载到DRAM中),能够容纳用户自定义设备的程序文件,就可以把这些内存利用起来
版权声明:本文为weixin_36168996原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。