opencv 玻璃镜面缺陷检测,缺陷信息标记及提取
作者:scutjy2015@163.com
Part 1 部分效果图


Part 2 源程序
#include <opencv2\opencv.hpp>
#include <iostream>
//#include <cv.h>
//#include <cxcore.h>
//#include <highgui.h>
//#include <iostream>
//#include<opencv2/imgproc/imgproc.hpp>
#include <string>
//#include <list>
//#include <vector>
//#include <map>
//#include <stack>
//#include <opencv2/highgui/highgui.hpp>
#include <stdio.h>
//#include <math.h>
using namespace cv;
using namespace std;
//定义灰度图像变量
IplImage *g_GrayImage = NULL;
//定义二值化图片变量
IplImage *g_BinaryImage = NULL;
//定义二值化窗口标题
const char *WindowBinaryTitle = "二值化图片";
//定义滑块响应函数
//创建源图像窗口标题变量
const char *WindowSrcTitle = "灰度图像";
//创建滑块标题变量
const char *TheSliderTitle = "二值化阀值";
const char *SrcPath = "G:/AA computer vision/vs_opencv_example/defect detecting 201706291343/picture/1706201246_ 38.jpg"; 定义图片路径
IplImage *g_pGrayImage_liantong = NULL;
IplImage *g_pBinralyImage_liantong = NULL;
int contour_num = 0; //数字编号
char number_buf[10]; 数字编号存入数组,puttext
#define num_col 11 二维数组的列,每一个点缺陷信息的详细信息
long int liantong_all_area = 0; 连通区域总面积
long int Rect_all_area = 0; 保存最小外接矩形总的面积
=====================================================================
struct my_struct1{
double scale; 定义显示图像的比例
const int threshold_value_binaryzation; 定义第一次二值化阀值
const int threshold_value_second_binaryzation; 定义第一次二值化阀值
};
my_struct1 picture = { 0.3, 50, 100 };
=====================================================================
struct my_struct2{
int Model1_k1 ; 图像膨胀腐蚀
int Model1_k2 ; 图像膨胀腐蚀
int Model2_k1 ; 图像膨胀腐蚀
int Model2_k2 ; 图像膨胀腐蚀
} ;
my_struct2 value = {5,2,3,2};
=====================================================================
struct my_struct3{
double maxarea ; 最大缺陷面积
double minarea ; 最小显示保留的缺陷面积
double font_scale ; 字体大小
int font_thickness ; 字体粗细
const int Feature_value2_number ; 定义一个二维数组的列,即缺陷的个数
};
my_struct3 value2 = { 0, 4, 0.6, 0.8 , 100};
=====================================================================
struct my_struct4{
const int hough_Canny_thresh1 ;
const int hough_Canny_thresh2 ;
const int hough_Canny_kernel ;
const int cvHoughLines2_thresh ; 像素值大于多少才显示,值越大,显示的线段越少
const int cvHoughLines2_param1 ; 显示线段的最小长度
const int cvHoughLines2_param2 ; 线段之间的 最小间隔
};
my_struct4 Hough = { 50, 100, 3, 50, 20, 10};
=====================================================================
int** on_trackbar( ){
CvSeq* contour = 0;
CvSeq* _contour = contour;
//定义存放数组的二维数组,返回指针数组
int** Feature_value2 =0;
Feature_value2 = new int*[value2.Feature_value2_number];
IplImage *SrcImage_or;
CvSize src_sz;
===============================================================================================
//载入原图
IplImage *SrcImage_origin = cvLoadImage(SrcPath, CV_LOAD_IMAGE_UNCHANGED);
//resize
src_sz.width = SrcImage_origin->width* picture.scale;
src_sz.height = SrcImage_origin->height* picture.scale;
SrcImage_or = cvCreateImage(src_sz, SrcImage_origin->depth, SrcImage_origin->nChannels);
cvResize(SrcImage_origin, SrcImage_or, CV_INTER_CUBIC);
//cvNamedWindow("原图", CV_WINDOW_AUTOSIZE);
显示原图到原图窗口
//cvShowImage("原图", SrcImage);
//单通道灰度化处理
g_GrayImage = cvCreateImage(cvSize(SrcImage_or->width, SrcImage_or->height), IPL_DEPTH_8U, 1);
cvCvtColor(SrcImage_or, g_GrayImage, CV_BGR2GRAY);
//创建二值化原图
g_BinaryImage = cvCreateImage(cvGetSize(g_GrayImage), IPL_DEPTH_8U, 1);
cvThreshold(g_GrayImage, g_BinaryImage, picture.threshold_value_binaryzation, 255, CV_THRESH_BINARY);
//显示二值化后的图片
cvShowImage(WindowBinaryTitle, g_BinaryImage);
===============================================================================================图像膨胀腐蚀
//g_BinaryImage = cvCloneImage(g_BinaryImage); 膨胀腐蚀
//先cvDilate后cvErode,先膨胀后腐蚀,这个为闭合操作,图片中断裂处会缝合。
//利用这个操作可以填充细小空洞,连接临近物体,平滑物体边缘,同时不明显改变物体面积
IplImage* temp_cvDilate = cvCreateImage(cvGetSize(g_BinaryImage), IPL_DEPTH_8U, 1);
IplImage* temp_cvErode = cvCreateImage(cvGetSize(g_BinaryImage), IPL_DEPTH_8U, 1);
IplImage* temp_cvErode_cvErode = cvCreateImage(cvGetSize(g_BinaryImage), IPL_DEPTH_8U, 1);
IplConvKernel * myModel1;
myModel1 = cvCreateStructuringElementEx( //自定义5*5,参考点(3,3)的矩形模板
value.Model1_k1, value.Model1_k1, value.Model1_k2, value.Model1_k2, CV_SHAPE_ELLIPSE
);
IplConvKernel * myModel2;
myModel2 = cvCreateStructuringElementEx( //自定义5*5,参考点(3,3)的矩形模板
value.Model2_k1, value.Model2_k1, value.Model2_k2, value.Model2_k2, CV_SHAPE_RECT
);
CV_SHAPE_RECT, 长方形元素;
CV_SHAPE_CROSS, 交错元素 across - shaped element;
CV_SHAPE_ELLIPSE, 椭圆元素;
CV_SHAPE_CUSTOM, 用户自定义元素
//先膨胀后腐蚀
cvDilate(g_BinaryImage, temp_cvDilate, myModel1, 1);//膨胀
cvErode(temp_cvDilate, temp_cvErode_cvErode, myModel2, 1);//腐蚀
//namedWindow("temp_cvErode_cvErode", CV_WINDOW_AUTOSIZE);
//cvShowImage("temp_cvErode_cvErode", temp_cvErode_cvErode);
g_BinaryImage = cvCloneImage(temp_cvErode_cvErode); 膨胀腐蚀
///================================================================================================检测连通区域
CvMemStorage *liantong_storage = cvCreateMemStorage();
IplImage* liantogn_dst = cvCreateImage(cvGetSize(g_BinaryImage), 8, 3);
//提取轮廓
cvFindContours(g_BinaryImage, liantong_storage, &contour, sizeof(CvContour), CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);
cvZero(liantogn_dst);//清空数组
int n = -1, m = 0;//n为面积最大轮廓索引,m为迭代索引
-----------------------------------------------------------对连通区域做处理
for (; contour != 0; contour = contour->h_next)
{
double tmparea = fabs(cvContourArea(contour));
if (tmparea <= value2.minarea)
{
cvSeqRemove(contour, 0); //删除面积小于设定值的轮廓
continue;
}
else
{
liantong_all_area = liantong_all_area + tmparea;
}
CvRect aRect = cvBoundingRect(contour, 0);
//if ((aRect.width / aRect.height)<1)
//{
// cvSeqRemove(contour, 0); //删除宽高比例小于设定值的轮廓
// continue;
//}
if (tmparea > value2.maxarea)
{
value2.maxarea = tmparea;
n = m;
}
m++;
CvScalar color = CV_RGB(0, 255, 255);
cvDrawContours(liantogn_dst, contour, color, color, -1, -1, 8);//绘制外部和内部的轮廓
}
long int sizeof_pic = liantogn_dst->width*liantogn_dst->height; 获取图像大小
//cvNamedWindow("连通区域", 1);
//cvShowImage("连通区域", liantogn_dst);
///------------------------------------------------------------------------------------数字标记图像类型转换
IplImage *label_liantogn_dst_origin = NULL;
label_liantogn_dst_origin = cvCloneImage(liantogn_dst); 膨胀腐蚀
Mat label_liantogn_dst = cvarrToMat(label_liantogn_dst_origin);
//cvNamedWindow("label_liantogn_dst", 1);
//imshow("label_liantogn_dst", label_liantogn_dst);
///------------------------------------------------------------------------------------第二次二值化
IplImage *g_BinaryImage_fanse_origin = NULL;
// 转为灰度图
g_pGrayImage_liantong = cvCreateImage(cvGetSize(liantogn_dst), IPL_DEPTH_8U, 1);
cvCvtColor(liantogn_dst, g_pGrayImage_liantong, CV_BGR2GRAY);
// 创建二值图
g_pBinralyImage_liantong = cvCreateImage(cvGetSize(g_pGrayImage_liantong), IPL_DEPTH_8U, 1);
// 转为二值图
cvThreshold(g_pGrayImage_liantong, g_pBinralyImage_liantong, picture.threshold_value_second_binaryzation, 255, CV_THRESH_BINARY);
// 显示二值图
cvNamedWindow("liantong_erzhihua_2", CV_WINDOW_AUTOSIZE);
cvShowImage("liantong_erzhihua_2", g_pBinralyImage_liantong);
Mat g_pBinralyImage_liantong_2 = cvarrToMat(g_pBinralyImage_liantong);
imwrite("save_Binra.jpg", g_pBinralyImage_liantong_2);
IplImage* fanse_origin = cvCloneImage(g_pBinralyImage_liantong); 为下一步反色先保存数据
//g_BinaryImage = cvCloneImage(liantogn_dst);
///================================================================================================求最小外接矩形
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *seq = NULL;
int cnt = cvFindContours(g_pBinralyImage_liantong, storage, &seq);
seq = seq->h_next;
double length = cvArcLength(seq);
double area = cvContourArea(seq);
CvRect rect = cvBoundingRect(seq, 1);
CvBox2D box = cvMinAreaRect2(seq, NULL);
IplImage *SrcImage;
CvSize sz;
///
//IplImage* dst_min_rec = cvLoadImage("G:\\AA computer vision\\vs_opencv_example\\defect detecting 201706261446\\picture\\1706201245_ 33.jpg", 1);
IplImage* dst_min_rec = cvLoadImage(SrcPath, 1);
sz.width = dst_min_rec->width* picture.scale;
sz.height = dst_min_rec->height* picture.scale;
SrcImage = cvCreateImage(sz, dst_min_rec->depth, dst_min_rec->nChannels);
cvResize(dst_min_rec, SrcImage, CV_INTER_CUBIC);
dst_min_rec = cvCloneImage(SrcImage); 前面,已经事先定义
cvFindContours(g_pBinralyImage_liantong, storage, &contour, sizeof(CvContour), CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE);
for (; contour != 0; contour = contour->h_next)
{
CvBox2D rect = cvMinAreaRect2(contour, storage);
CvPoint2D32f rect_pts0[4];
cvBoxPoints(rect, rect_pts0);
//因为cvPolyLine要求点集的输入类型是CvPoint**
//所以要把 CvPoint2D32f 型的 rect_pts0 转换为 CvPoint 型的 rect_pts
//并赋予一个对应的指针 *pt
int npts = 4, k = 0;
int aaa = 0, bbb = 0;
CvPoint rect_pts[4], *pt = rect_pts;
int sum_rect_x = 0, sum_rect_y = 0;
int chang = 0, kuan = 0;
//printf("编号:%4d 连通区域最小外接矩形顶点坐标分别为:\n", contour_num);
//Feature_value[0] = contour_num; //特征值数组第一个数
Feature_value2[contour_num] = new int[num_col];
for (int i = 0; i<4; i++)
{
rect_pts[i] = cvPointFrom32f(rect_pts0[i]);
// printf("%d %d\n", rect_pts[i].x, rect_pts[i].y);
===============================================================
Feature_value2[contour_num][i] = rect_pts[i].x; //特征值数组第0-3个数
Feature_value2[contour_num][i+4] = rect_pts[i].y; //特征值数组第4-7个数
sum_rect_x += rect_pts[i].x;
sum_rect_y += rect_pts[i].y;
aaa = (int)sqrt((pow((rect_pts[0].x - rect_pts[1].x), 2) + pow((rect_pts[0].y - rect_pts[1].y), 2)));
bbb = (int)sqrt((pow((rect_pts[0].x - rect_pts[3].x), 2) + pow((rect_pts[0].y - rect_pts[3].y), 2)));
if (aaa<bbb)
{
k = aaa;
aaa = bbb;
bbb = k;
}
}
//printf("最小外接矩形的长为:%d,宽为:%d。面积:%d \n\n", aaa, bbb, aaa*bbb);
Feature_value2[contour_num][8] = aaa; //特征值数组第8个数
Feature_value2[contour_num][9] = bbb; //特征值数组第9个数
Feature_value2[contour_num][10] = aaa*bbb; //特征值数组第10个数
Rect_all_area = Rect_all_area + aaa*bbb; // 保存最小外接矩形总的面积
int font_face = cv::FONT_HERSHEY_COMPLEX;
cv::Point origin;
origin.x = sum_rect_x/4;
origin.y = sum_rect_y/4;
数字标记
sprintf(number_buf, "%3d", contour_num);
string number_buf_string = number_buf;
putText(label_liantogn_dst, number_buf_string, origin, font_face, value2.font_scale, cv::Scalar(0, 255, 255), value2.font_thickness, 8, 0);
//画出Box
cvPolyLine(dst_min_rec, &pt, &npts, 1, 1, CV_RGB(255, 0, 0), 1);
contour_num++; //连通区域个数,用于数字标记
}
cvNamedWindow("label_liantogn_dst_result", CV_WINDOW_AUTOSIZE);//分配一个用以承载图片的窗口
line(label_liantogn_dst, Point(0, dst_min_rec->height*0.25), Point(dst_min_rec->width, dst_min_rec->height*0.25), Scalar(89, 90, 90), 1);
line(label_liantogn_dst, Point(0, dst_min_rec->height*0.5), Point(dst_min_rec->width, dst_min_rec->height*0.5), Scalar(89, 90, 90), 1);
line(label_liantogn_dst, Point(0, dst_min_rec->height*0.75), Point(dst_min_rec->width, dst_min_rec->height*0.75), Scalar(89, 90, 90), 1);
line(label_liantogn_dst, Point(dst_min_rec->width*0.25, 0), Point(dst_min_rec->width*0.25, dst_min_rec->height), Scalar(89, 90, 90), 1);
line(label_liantogn_dst, Point(dst_min_rec->width*0.5, 0), Point(dst_min_rec->width*0.5, dst_min_rec->height), Scalar(89, 90, 90), 1);
line(label_liantogn_dst, Point(dst_min_rec->width*0.75, 0), Point(dst_min_rec->width*0.75, dst_min_rec->height), Scalar(89, 90, 90), 1);
显示原点(0,0)
Point p2;
p2.x = 10;
p2.y = 10;
//画实心点
circle(label_liantogn_dst, p2, 5, Scalar(0, 0, 255), -1); //第五个参数我设为-1,表明这是个实点。
imshow("label_liantogn_dst_result", label_liantogn_dst);
imwrite("save_Label.jpg", label_liantogn_dst);
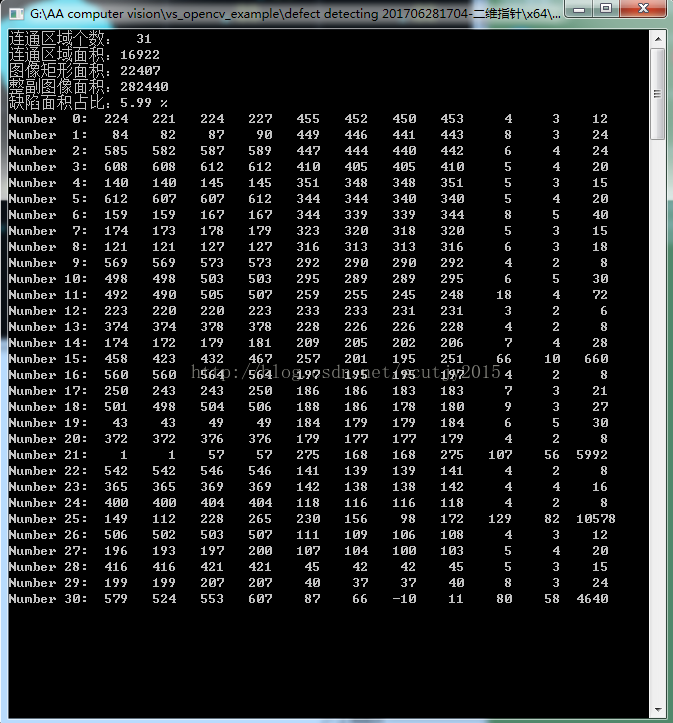
printf("连通区域个数:%4d \n", contour_num);
cvNamedWindow("外接矩形", CV_WINDOW_AUTOSIZE);//分配一个用以承载图片的窗口
//cvLine(dst_min_rec, cvPoint(0, 50), cvPoint(dst_min_rec->width, 50), CV_RGB(255, 0, 0), 1);
cvShowImage("外接矩形", dst_min_rec);
//Mat dst_min_rec_result = cvarrToMat(dst_min_rec);
//imwrite("save_rect1.jpg", dst_min_rec_result);
cvSaveImage("save_Rectg.jpg", dst_min_rec);
/================================================================================================求最小外接矩形
float temp_percent = 0.0;
printf("连通区域面积:%d\r\n", liantong_all_area); // 打印连通区域面积,放在前面被掩盖,所以放在后面
printf("图像矩形面积:%d\r\n", Rect_all_area);
printf("整副图像面积:%d\r\n", sizeof_pic);
temp_percent = (float)liantong_all_area / sizeof_pic * 100;
printf("缺陷面积占比:%0.2f %%\r\n", temp_percent);
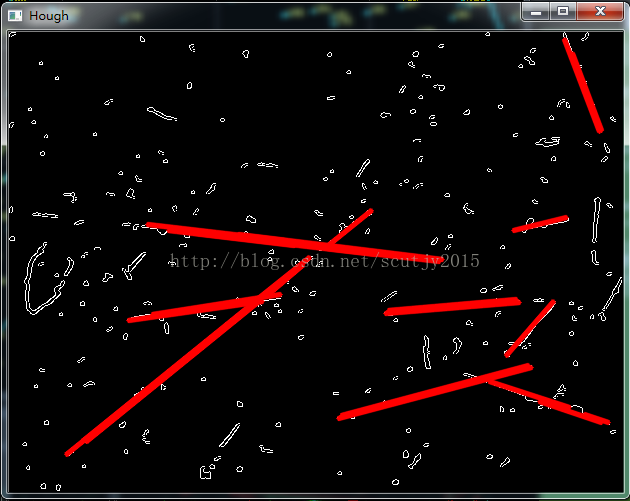
/================================================================================================hough 直线检测
//IplImage* src = cvLoadImage(g_BinaryImage, 0);
//IplImage *SrcImage_origin = cvLoadImage(SrcPath, CV_LOAD_IMAGE_UNCHANGED);
IplImage* lines_dst;
IplImage* color_dst;
CvMemStorage* lines_storage = cvCreateMemStorage(0);
CvSeq* lines = 0;
int hough_i;
lines_dst = cvCreateImage(cvGetSize(liantogn_dst), 8, 1);
color_dst = cvCreateImage(cvGetSize(liantogn_dst), 8, 3);
cvCanny(liantogn_dst, lines_dst, Hough.hough_Canny_thresh1, Hough.hough_Canny_thresh2, Hough.hough_Canny_kernel);
cvCvtColor(lines_dst, color_dst, CV_GRAY2BGR);
#if 0
lines = cvHoughLines2(lines_dst, lines_storage, CV_HOUGH_STANDARD, 1, CV_PI / 180, 100, 0, 0);
for (hough_i = 0; hough_i < MIN(lines->total, 100); hough_i++)
{
float* line = (float*)cvGetSeqElem(lines, hough_i);
float rho = line[0];
float theta = line[1];
CvPoint pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
cvLine(color_dst, pt1, pt2, CV_RGB(255, 0, 0), 3, CV_AA, 0);
}
#else
lines = cvHoughLines2(lines_dst, lines_storage, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, Hough.cvHoughLines2_thresh, Hough.cvHoughLines2_param1, Hough.cvHoughLines2_param2);
for (hough_i = 0; hough_i < lines->total; hough_i++)
{
CvPoint* line = (CvPoint*)cvGetSeqElem(lines, hough_i);
cvLine(dst_min_rec, line[0], line[1], CV_RGB(0, 255, 255), 3, CV_AA, 0);
} dst_min_rec 矩形加直线 , color_dst 只有直线
#endif
//cvNamedWindow("liantogn_dst", 1);
//cvShowImage("liantogn_dst", liantogn_dst);
cvNamedWindow("Hough", 1);
cvShowImage("Hough", dst_min_rec);
cvSaveImage("save_Hough.jpg", liantogn_dst);
本打算通过膨胀腐蚀的办法来填充中间,再计算面积比
=============================================================================================图像反色
//获取图片的一些属性
int trans_W_B_height = fanse_origin->height; // 图像高度
int trans_W_B_width = fanse_origin->width; // 图像宽度(像素为单位)
int trans_W_B_step = fanse_origin->widthStep; // 相邻行的同列点之间的字节数
int trans_W_B_channels = fanse_origin->nChannels; // 颜色通道数目 (1,2,3,4)
uchar *trans_W_B_data = (uchar *)fanse_origin->imageData;
//反色操作
for (int i = 0; i != trans_W_B_height; ++i)
{
for (int j = 0; j != trans_W_B_width; ++j)
{
for (int k = 0; k != trans_W_B_channels; ++k)
{
trans_W_B_data[i*trans_W_B_step + j*trans_W_B_channels + k] = 255 - trans_W_B_data[i*trans_W_B_step + j*trans_W_B_channels + k];
}
}
}
cvNamedWindow("fanse_origin", 1);
cvShowImage("fanse_origin", fanse_origin);
=============================================================================================图像反色
return Feature_value2; 返回该数组
}
int main(){
int **Tan_return;
Tan_return = on_trackbar( ); //调用DLL
for (int i = 0; i < contour_num; i++)
{
printf("Number%3d: ", i);
for (int j = 0; j < num_col; j++)
{
printf("%4d ", Tan_return[i][j]);
}
printf("\r\n");
}
========================= 释放内存
for (int i = 0; i < contour_num; i++)
{
delete[] Tan_return[i];
}
delete[] Tan_return;
cvWaitKey(0);
销毁窗口,释放图片(实际运行退出时一定要销毁窗口)
//cvDestroyWindow(WindowBinaryTitle);
//cvDestroyWindow(WindowSrcTitle);
//cvReleaseImage(&g_BinaryImage);
//cvReleaseImage(&g_GrayImage);
//cvReleaseImage(&SrcImage);
return 0;
}
Part 3 其他实验图片




版权声明:本文为scutjy2015原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。