DJI妙算 Manifold2G(TX2)(ubuntu16.04)之ZED2立体相机开发(一)
(一)ZED相机开发环境搭建
1:TX2刷机
搭建ZED2开发环境时需要tx2提前安装好Jetpack3.3 Ubuntu16.04 和CUDA9,由于我所购买的DJI Manifold2-G已经提前安装好这些软件,所以没有进行前面的操作,如果你的TX2没有安装这些建议先参考其它博客将这些软件安装好。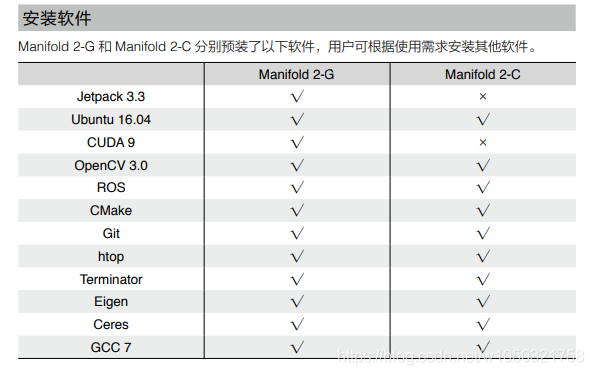
(二)下载 ZED SDK
前往ZED的官网找到适合的SDK版本,并进行下载,由于网络原因我的电脑打开zed的官网很慢,我选择从手机端下载,然后上传到百度云,再下载到U盘,最后拷到TX2上。
我下载的版本为:ZED_SDK_Linux_Tegra_JP33_v2.8.5.run(此版本较高,出现了问题,详见(六)出现的问题及解决办法)
网址为:https://www.stereolabs.com/developers/release/2.8/
请注意选择对应的版本
(三)安装
#根据自己下载的版本选择
chmod +x ZED_SDK_Linux_Tegra_JP33_V2.8.5.run
./ZED_SDK_Linux_Tegra_JP33_V2.8.5.run
根据提示完成安装
(四)测试
进入安装文件所在目录
测试图像信息
cd /usr/local/zed/tools/
./"ZED Explorer"
测试深度信息
cd /usr/local/zed/tools/
./"ZED Depth Viewer"
(五)效果
图像效果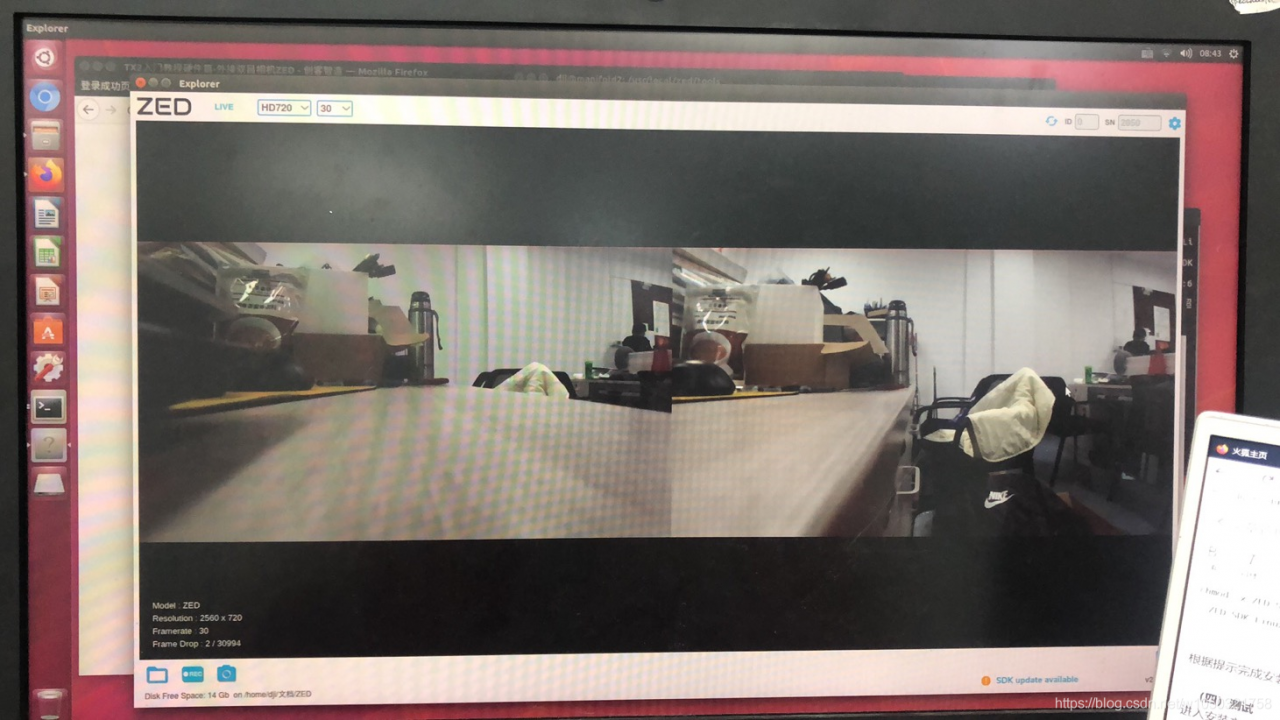
深度信息效果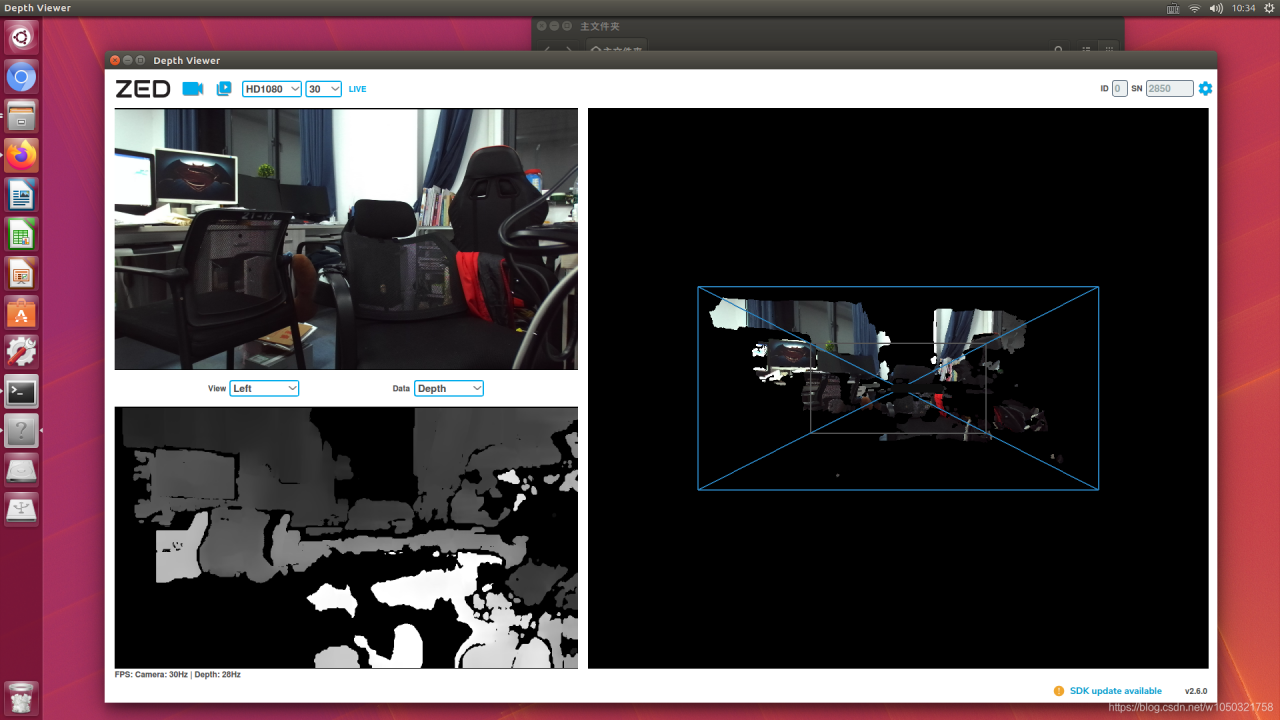 (六)出现的问题及解决办法
(六)出现的问题及解决办法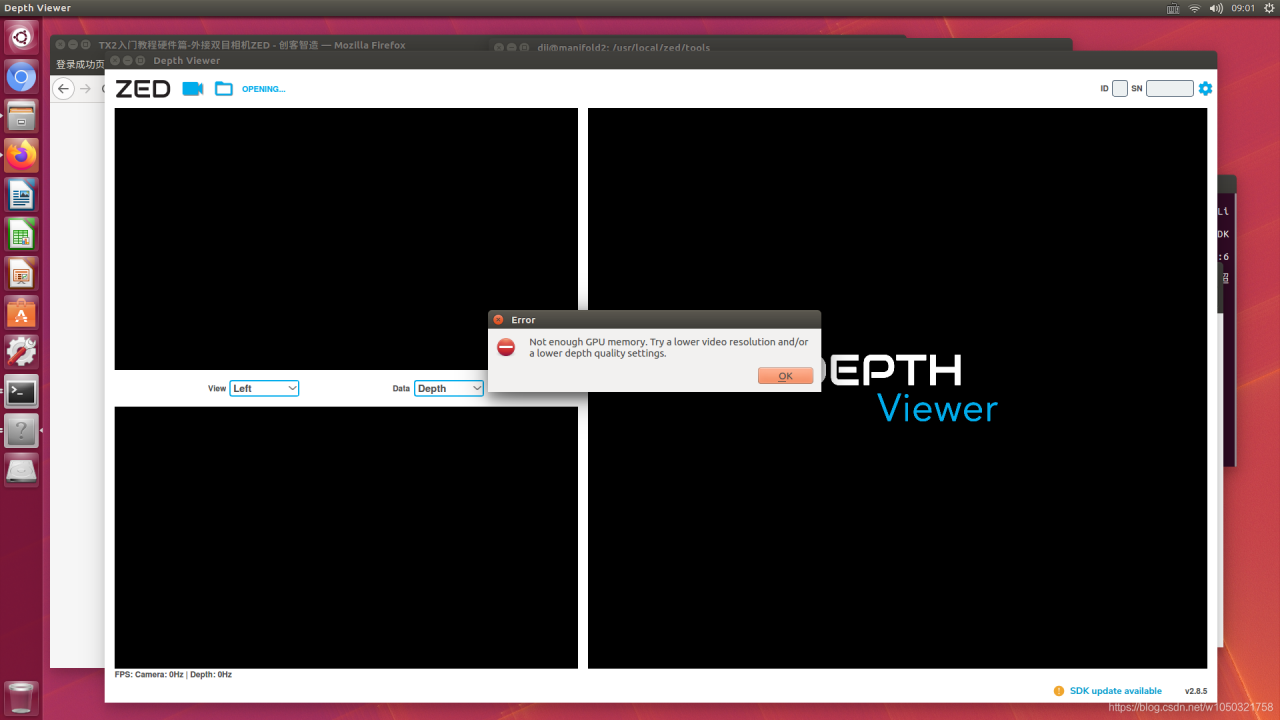
Not enough GPU memory:出现此问题可能是因为由于下载的ZED SDK版本较高,而TX2的Jetpack和CUDA没有更新到较高版本,导致GPU的内存不够。
解决办法:更新Jetpack和CUDA或者更换较低版本的ZED SDK。
我解决的方法是将ZED的SDK降低到到2.6.0。ZED_SDK_Linux_JTX2_JP3.2_v2.6.0.run。
重新按照上述步骤走一遍,再次打开图像画面时图像的分辨率和帧率都降低了,此时再打开深度图像便没有出现此问题。
版权声明:本文为w1050321758原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。