Anchor Free的目标检测
- anchor based 目标检测,比如:Fast-RCNN、Faster-RCNN、SSD、YOLOV2、YOLOV3.
基于anchor-based的技术包括一个阶段和两个阶段的检测。
其中一阶段的检测技术包括SSD,DSSD,RetinaNet,RefineDet,YOLOV3等,
二阶段技术包括Faster-RCNN,R-FCN,FPN,Cascade R-CNN,SNIP等。
一般的,两个阶段的目标检测会比一个阶段的精度要高,但一个阶段的算法速度会更快。
二步法相对于一步法有以下几个优势:
(a).二阶段的分类
(b).二阶段的回归
(c).二阶段的特征
(d).特征校准
为了能让一步法也具备二步法的这些个优势,提出了RefineDet、SRN、AlignDet等一些列检测算法。
- anchor free 目标检测,比如:YOLOV1,CornerNet、FCOS
anchor-free的技术包括基于Keypoint与Segmentation两类。
其中基于Keypoint技术包括CornerNet,CenterNet,CornerNet-Lite等,
基于Segmentation的技术包括FSAF,FCOS,FoveaBox等。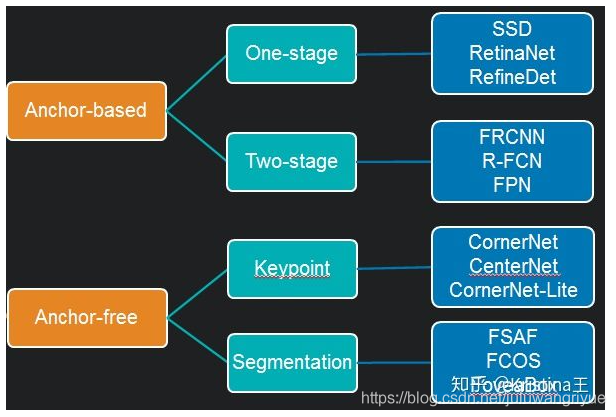
anchor-base存在的问题:
•与锚点框相关超参 (scale、aspect ratio、IoU Threshold) 会较明显的影响最终预测效果;
•预置的锚点大小、比例在检测差异较大物体时不够灵活;
•大量的锚点会导致运算复杂度增大,产生的参数较多;
•容易导致训练时negative与positive的比例失衡。
Anchor-free算法的优点:
•使用类似分割的思想来解决目标检测问题;
•不需要调优与anchor相关的超参数;
•避免大量计算GT boxes和anchor boxes 之间的IoU,使得训练过程占用内存更低。
参考:anchor free:CornerNet解读【目标检测】
参考:物体检测的轮回: anchor-based 与 anchor-free
参考:
版权声明:本文为juluwangriyue原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。