首先说明一下使用Matlab2019a自带的Camera Calibrator工具箱完成单目相机的内参标定,在搜集资料过程中,发现利用Camera Calibrator工具箱也可以对双目相机进行标定,并且发现还有个Calibration Toolbox工具箱同样可以完成单、双目相机标定,只不过过程繁琐一点,本文仅仅是利用Camera Calibrator工具箱完成单目相机标定!
首先需要打印一张标定板图像,将它贴在一个平面上,作为标定物,或者直接购买一个标定板。
推荐一个生成相机标定板文件(pdf)的网站:标定文件生成网站 (可选择多种标定板样式)
(可选择多种标定板样式)通过调整标定板或摄像机的方向,为标定物拍摄一组不同方向的照片,最好大于10张图片
本文所使用的图片文件:Matlab 标定图片打开Matlab,在Matlab中找到APP,点击进入,找到Camera Calibrator工具箱
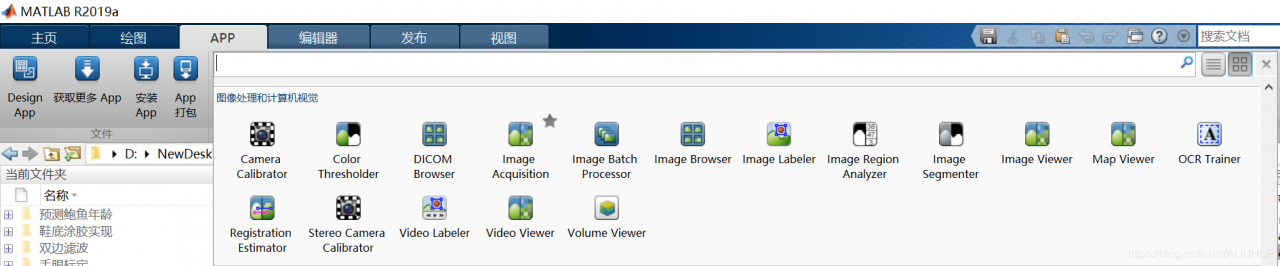 进入工具箱,点击Add Images
进入工具箱,点击Add Images 将所有图片添加进去
将所有图片添加进去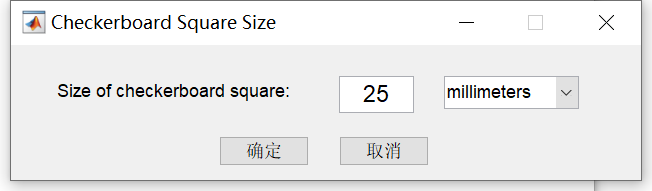 (这里的25是指棋盘中正方形的边长大小)
(这里的25是指棋盘中正方形的边长大小)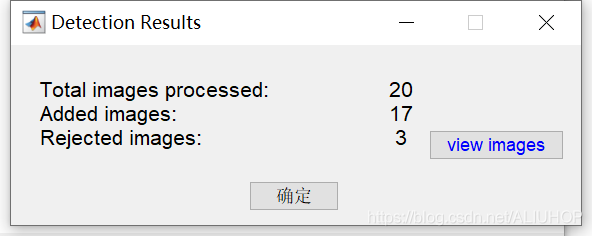 出现这个画面,表示有3张图片不可用
出现这个画面,表示有3张图片不可用 然后点击Calibrate按钮,即完成标定
然后点击Calibrate按钮,即完成标定 点击 Export Camera Parameters,可在matlab工作空间里可以看到相机参数的属性
点击 Export Camera Parameters,可在matlab工作空间里可以看到相机参数的属性 查看相机内参可以直接在命令行窗口输入:
查看相机内参可以直接在命令行窗口输入:
cameraParams.IntrinsicMatrix
同理可以查看其它参数下面是对相机参数的介绍:
| 中文名 | 英文名 |
|---|---|
| 内参矩阵 | Intrinsic Matrix |
| 焦距 | Focal Length |
| 主点 | Principal Point |
| 径向畸变 | Radial Distortion |
| 切向畸变 | Tangential Distortion |
| 旋转矩阵 | Rotation Matrices |
| 平移向量 | Translation Vectors |
| 平均重投影误差 | Mean Reprojection Error |
| 重投影误差 | Reprojection Errors |
| 重投影点 | Reprojected Points |
版权声明:本文为ALIUHOP原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。