https://mp.weixin.qq.com/s/e_25NUo5C_IhVck6dl3Tfg
如下将编码器与Arduino连接:
A相:PIN 2( arduino的中断器引脚)
B相:PIN 4( arduino的中断器引脚)
电源:5V
地:GND
在这里,我们必须注意,编码器的A、B相输出必须仅连接到Aorduino的中断引脚。否则,arduino无法记录来自编码器的每个脉冲。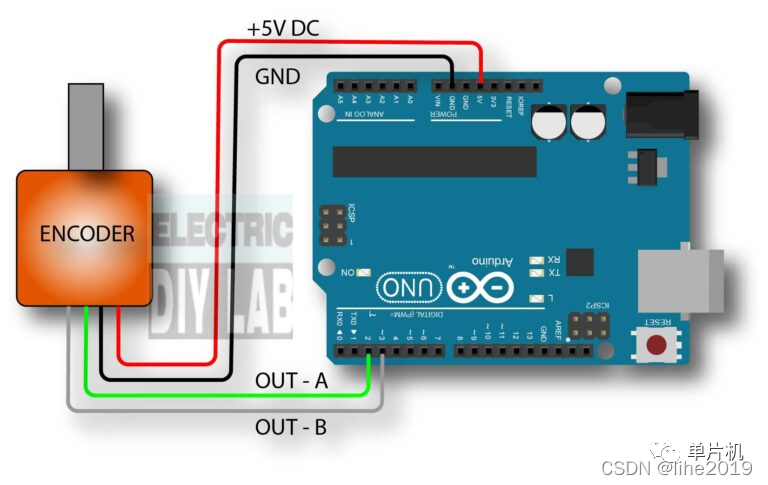
volatile long temp, encoderCounter =0; //This variable will increase or decreas depending on the rotation of encoder
int encoderPinA = 2; //interrupt pin 2
int encoderPinB = 3; //interrrupt pin 3
void setup() {
Serial.begin (115200);
pinMode (encoderPinA, INPUT);
pinMode (encoderPinB, INPUT);
//Setting up interrupt
//attach an interrupt to pin encoderPinA & encoderPinA of the Arduino, and when the pulse is in the CHANGE edge called the function doEncoderA()/doEncoderB()
attachInterrupt (digitalPinToInterrupt(encoderPinA), doEncoderA, CHANGE);//B rising pulse from encodenren activated ai1(). AttachInterrupt 1 isDigitalPin nr 3 on moust Arduino.
attachInterrupt (digitalPinToInterrupt(encoderPinB), doEncoderB, CHANGE);
}
void loop() {
// Send the value of counter
if ( encoderCounter!= temp){
Serial.println (encoderCounter);
temp = encoderCounter;
}
}
void doEncoderA(){
// look for a low-to-high on channel A
if (digitalRead(encoderPinA) == HIGH) {
// check channel B to see which way encoder is turning
if (digitalRead(encoderPinB) == LOW) {
encoderCounter = encoderCounter + 1; // CW
}
else {
encoderCounter = encoderCounter - 1; // CCW
}
}
else // must be a high-to-low edge on channel A
{
// check channel B to see which way encoder is turning
if (digitalRead(encoderPinB) == HIGH) {
encoderCounter = encoderCounter + 1; // CW
}
else {
encoderCounter = encoderCounter - 1; // CCW
}
}
//Serial.println (encoder0Pos, DEC);
// use for debugging - remember to comment out
}
void doEncoderB(){
// look for a low-to-high on channel B
if (digitalRead(encoderPinB) == HIGH) {
// check channel A to see which way encoder is turning
if (digitalRead(encoderPinA) == HIGH) {
encoderCounter = encoderCounter + 1; // CW
}
else {
encoderCounter = encoderCounter - 1; // CCW
}
}
// Look for a high-to-low on channel B
else {
// check channel B to see which way encoder is turning
if (digitalRead(encoderPinA) == LOW) {
encoderCounter = encoderCounter + 1; // CW
}
else {
encoderCounter = encoderCounter - 1; // CCW
}
}
}
将代码上传到arduino后,打开串行监视器
并旋转编码器轴,如果沿顺时针方向旋转编码器,则值会增加;如果沿逆时针方向旋转,则值会减小。
进一步通过:
double angle = encoderCounter*360/172032.0;//ppr=172032
可以获取电机转动角度
版权声明:本文为lihe4151021原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。